fminimax
Resolver un problema de restricción minimax
Sintaxis
Descripción
fminimax busca un punto que minimice el máximo de un conjunto de funciones objetivo.
El problema incluye cualquier tipo de restricción. En detalle, fminimax busca el mínimo de un problema especificado por
donde b y beq son vectores, A y Aeq son matrices y c(x), ceq(x) y F(x) son funciones que devuelven vectores. F(x), c(x) y ceq(x) pueden ser funciones no lineales.
x, lb y ub se pueden pasar como vectores o matrices; consulte Argumentos de matriz.
También se pueden resolver problemas max-min con fminimax, usando la identidad
Puede resolver problemas con el formato
utilizando la opción AbsoluteMaxObjectiveCount; consulte Resolver un problema minimax utilizando el valor absoluto de un objetivo.
x = fminimax(fun,x0)x0 y encuentra una solución minimax x para las funciones descritas en fun.
Nota
En Pasar parámetros adicionales se explica cómo pasar parámetros adicionales a las funciones objetivo y a las funciones de restricción no lineales, si fuera necesario.
x = fminimax(fun,x0,A,b,Aeq,beq,lb,ub)lb ≤ x ≤ ub. Si no existen igualdades, establezca Aeq = [] y beq = []. Si x(i) está desacotado por abajo, establezca lb(i) = –Inf; si x(i) está desacotado por arriba, establezca ub(i) = Inf.
Nota
Nota
Si los límites de entrada especificados para un problema son inconsistentes, la salida x es x0 y la salida fval es [].
Ejemplos
Minimizar el máximo de sin y cos
Cree una gráfica de las funciones sin y cos y su máximo sobre el intervalo [–pi,pi].
t = linspace(-pi,pi); plot(t,sin(t),'r-') hold on plot(t,cos(t),'b-'); plot(t,max(sin(t),cos(t)),'ko') legend('sin(t)','cos(t)','max(sin(t),cos(t))','Location','NorthWest')
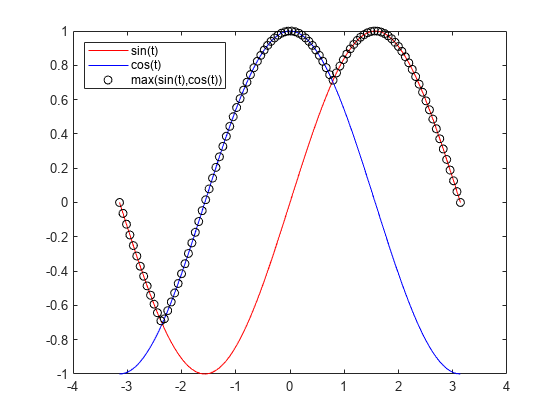
La gráfica muestra dos mínimos locales del máximo, uno cerca de 1 y el otro cerca de -2. Encuentre el mínimo cercano a 1.
fun = @(x)[sin(x);cos(x)]; x0 = 1; x1 = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance.
x1 = 0.7854
Encuentre el mínimo cercano a -2.
x0 = -2; x2 = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance.
x2 = -2.3562
Resolver un problema minimax con restricciones lineales
Las funciones objetivo de este ejemplo son lineales con constantes. Para ver una descripción y una gráfica de las funciones objetivo, consulte Comparar fminimax y fminunc.
Establezca las funciones objetivo como tres funciones lineales con el formato para tres vectores y tres constantes .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
Encuentre el punto minimax sujeto a la desigualdad x(1) + 3*x(2) <= –4.
A = [1,3]; b = -4; x0 = [-1,-2]; x = fminimax(fun,x0,A,b)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance.
x = 1×2
-5.8000 0.6000
Resolver un problema minimax con límites y restricciones
Las funciones objetivo de este ejemplo son lineales con constantes. Para ver una descripción y una gráfica de las funciones objetivo, consulte Comparar fminimax y fminunc.
Establezca las funciones objetivo como tres funciones lineales con el formato para tres vectores y tres constantes .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
Establezca límites en los que –2 <= x(1) <= 2 y –1 <= x(2) <= 1, y resuelva el problema minimax partiendo de [0,0].
lb = [-2,-1];
ub = [2,1];
x0 = [0,0];
A = []; % No linear constraints
b = [];
Aeq = [];
beq = [];
[x,fval] = fminimax(fun,x0,A,b,Aeq,beq,lb,ub)Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance.
x = 1×2
-0.0000 1.0000
fval = 1×3
3.0000 -2.0000 3.0000
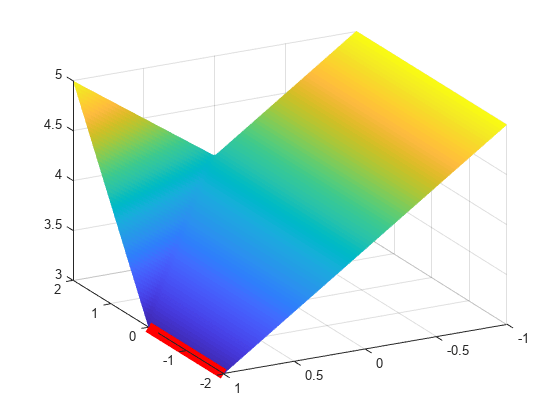
En este caso, la solución no es única. Muchos puntos satisfacen las restricciones y tienen el mismo valor minimax. Represente la superficie con el máximo de las tres funciones objetivo y represente con una línea roja los puntos que tienen el mismo valor minimax.
[X,Y] = meshgrid(linspace(-2,2),linspace(-1,1)); Z = max(fun([X(:),Y(:)]),[],2); Z = reshape(Z,size(X)); surf(X,Y,Z,'LineStyle','none') view(-118,28) hold on line([-2,0],[1,1],[3,3],'Color','r','LineWidth',8) hold off
Encontrar el minimax sujeto a restricciones no lineales
Las funciones objetivo de este ejemplo son lineales con constantes. Para ver una descripción y una gráfica de las funciones objetivo, consulte Comparar fminimax y fminunc.
Establezca las funciones objetivo como tres funciones lineales con el formato para tres vectores y tres constantes .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
La función unitdisk representa la restricción de desigualdad no lineal .
type unitdiskfunction [c,ceq] = unitdisk(x) c = x(1)^2 + x(2)^2 - 1; ceq = [];
Resuelva el problema minimax sujeto a la restricción unitdisk, partiendo de x0 = [0,0].
x0 = [0,0];
A = []; % No other constraints
b = [];
Aeq = [];
beq = [];
lb = [];
ub = [];
nonlcon = @unitdisk;
x = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance.
x = 1×2
-0.0000 1.0000
Resolver un problema minimax utilizando el valor absoluto de un objetivo
fminimax puede minimizar el máximo de o para los primeros valores de utilizando la opción AbsoluteMaxObjectiveCount. Para minimizar los valores absolutos de de los objetivos, ordene los valores de la función objetivo de modo que los valores de a sean los objetivos para la minimización absoluta, y establezca la opción AbsoluteMaxObjectiveCount en k.
En este ejemplo, minimice el máximo de sin y cos, especifique sin como primer objetivo y establezca AbsoluteMaxObjectiveCount en 1.
fun = @(x)[sin(x),cos(x)]; options = optimoptions('fminimax','AbsoluteMaxObjectiveCount',1); x0 = 1; A = []; % No constraints b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x1 = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance.
x1 = 0.7854
Intente empezar desde x0 = –2.
x0 = -2; x2 = fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance.
x2 = -3.1416
Represente la función.
t = linspace(-pi,pi); plot(t,max(abs(sin(t)),cos(t)))

Para ver el efecto de la opción AbsoluteMaxObjectiveCount, compare esta gráfica con la del ejemplo Minimizar el máximo de sin y cos.
Obtener el valor minimax
Obtenga tanto la ubicación del punto minimax como el valor de las funciones objetivo. Para ver una descripción y una gráfica de las funciones objetivo, consulte Comparar fminimax y fminunc.
Establezca las funciones objetivo como tres funciones lineales con el formato para tres vectores y tres constantes .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
Establezca el punto inicial en [0,0] y encuentre el punto y el valor minimax.
x0 = [0,0]; [x,fval] = fminimax(fun,x0)
Local minimum possible. Constraints satisfied. fminimax stopped because the size of the current search direction is less than twice the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance.
x = 1×2
-2.5000 2.2500
fval = 1×3
1.7500 1.7500 1.7500
Las tres funciones objetivo tienen el mismo valor en el punto minimax. Los problemas sin restricciones suelen tener al menos dos objetivos iguales en la solución, porque si un punto no es un mínimo local de ningún objetivo y solo un objetivo tiene el valor máximo, el objetivo máximo puede reducirse.
Obtener todas las salidas minimax
Las funciones objetivo de este ejemplo son lineales con constantes. Para ver una descripción y una gráfica de las funciones objetivo, consulte Comparar fminimax y fminunc.
Establezca las funciones objetivo como tres funciones lineales con el formato para tres vectores y tres constantes .
a = [1;1]; b = [-1;1]; c = [0;-1]; a0 = 2; b0 = -3; c0 = 4; fun = @(x)[x*a+a0,x*b+b0,x*c+c0];
Encuentre el punto minimax sujeto a la desigualdad x(1) + 3*x(2) <= –4.
A = [1,3]; b = -4; x0 = [-1,-2];
Establezca las opciones para obtener la visualización iterativa y obtenga todas las salidas del solver.
options = optimoptions('fminimax','Display','iter'); Aeq = []; % No other constraints beq = []; lb = []; ub = []; nonlcon = []; [x,fval,maxfval,exitflag,output,lambda] =... fminimax(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 4 0 6
1 9 5 0 1 0.981
2 14 4.889 0 1 -0.302 Hessian modified twice
3 19 3.4 8.132e-09 1 -0.302 Hessian modified twice
Local minimum possible. Constraints satisfied.
fminimax stopped because the size of the current search direction is less than
twice the value of the step size tolerance and constraints are
satisfied to within the value of the constraint tolerance.
x = 1×2
-5.8000 0.6000
fval = 1×3
-3.2000 3.4000 3.4000
maxfval = 3.4000
exitflag = 4
output = struct with fields:
iterations: 4
funcCount: 19
lssteplength: 1
stepsize: 6.0684e-10
algorithm: 'active-set'
firstorderopt: []
constrviolation: 8.1323e-09
message: 'Local minimum possible. Constraints satisfied....'
lambda = struct with fields:
lower: [2x1 double]
upper: [2x1 double]
eqlin: [0x1 double]
eqnonlin: [0x1 double]
ineqlin: 0.2000
ineqnonlin: [0x1 double]
Analice la información devuelta:
Dos valores de la función objetivo son iguales en la solución.
El solver converge en 4 iteraciones y 19 evaluaciones de función.
El valor
lambda.ineqlines distinto de cero, lo que indica que la restricción lineal está activa en la solución.
Argumentos de entrada
Argumentos de salida
Algoritmos
fminimax resuelve un problema minimax convirtiéndolo en un problema de consecución de metas y resolviendo a continuación el problema de consecución de metas convertido utilizando fgoalattain. La conversión pone todos los objetivos a 0 y todas las ponderaciones a 1. Consulte Ecuación 1 en Multiobjective Optimization Algorithms.
Funcionalidad alternativa
App
La tarea Optimize de Live Editor proporciona una interfaz visual para fminimax.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a
Consulte también
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)