Model Predictive Control Toolbox
Diseñe y simule controladores predictivos por modelo
¿Tiene preguntas? Comuníquese con ventas.
¿Tiene preguntas? Comuníquese con ventas.
Model Predictive Control Toolbox ofrece una app, funciones, bloques de Simulink y ejemplos de referencia para desarrollar control predictivo por modelo (MPC). Para problemas lineales, la toolbox permite diseñar MPC implícito, explícito, adaptativo y con planificación de ganancias. Para problemas no lineales, puede implementar MPC no lineal en una o varias etapas. Esta toolbox proporciona solvers de optimización desplegables y también permite utilizar un solver personalizado.
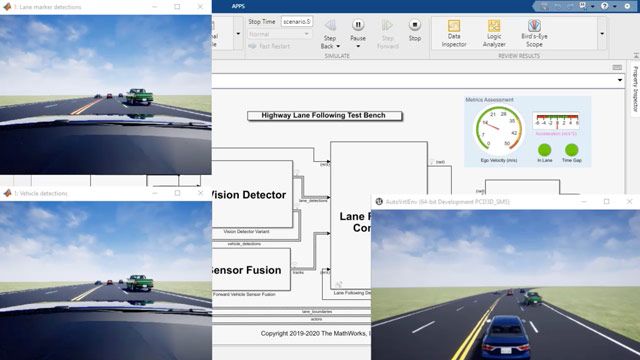
Puede evaluar el rendimiento de un controlador en MATLAB y Simulink ejecutando simulaciones de lazo cerrado. Para conducción autónoma, también puede utilizar los ejemplos y bloques proporcionados, conformes con MISRA C® e ISO 26262, para familiarizarse rápidamente con aplicaciones de asistencia de mantenimiento de carril, planificación de rutas, seguimiento de rutas y control de crucero adaptativo.
Esta toolbox admite la generación de código C y CUDA®, y de texto estructurado de IEC 61131-3.

Diseñe controladores de MPC implícitos, adaptativos y con planificación de ganancias que resuelvan un problema de programación cuadrática (QP). Genere un controlador de MPC explícito a partir de un diseño implícito. Utilice MPC de conjunto de control discreto para problemas de programación cuadrática de enteros mixtos.

Utilice la app MPC Designer para diseñar interactivamente controladores de MPC implícitos, linealizar un modelo de Simulink con Simulink Control Design, validar el rendimiento de un controlador utilizando escenarios de simulación y comparar las respuestas de varios diseños.

Diseñe controladores de MPC no lineales y económicos que utilicen Optimization Toolbox para resolver un problema de programación no lineal (NLP). Utilice una formulación de una o varias etapas para conseguir un control de retroalimentación y planificación óptimos.

Acelere el desarrollo de sistemas de conducción autónoma utilizando bloques prediseñados de Simulink que cumplen con los estándares ISO 26262 y MISRA C. Los bloques prediseñados permiten realizar planificación de rutas, seguimiento de rutas, control de crucero adaptativo y otras aplicaciones.

Seleccione entre solvers de QP integrados de conjuntos activos, puntos interiores y enteros mixtos, o bien, utilice solvers de NLP de Optimization Toolbox. Si prefiere, utilice solvers FORCESPRO de Embotech, o un solver personalizado propio.

Especifique modelos de predicción analíticamente con Control System Toolbox o Symbolic Math Toolbox, linealizando un modelo de Simulink con Simulink Control Design, o bien a través de datos medidos con System Identification Toolbox y Deep Learning Toolbox.

Estime el estado de un controlador a partir de salidas medidas utilizando el estimador de estados proporcionado, o un estimador de estados personalizado. Detecte posibles problemas de estabilidad y solidez en un diseño de MPC lineal utilizando la función de diagnóstico integrada.

Evalúe el rendimiento de un controlador ejecutando simulaciones de lazo cerrado, en Simulink con bloques de Simulink conformes con ISO 26262 y MISRA C, y en MATLAB con funciones de línea de comandos. Automatice las pruebas para varios escenarios con Simulink Test.

Genere automáticamente código C/C++ y CUDA de producción, o texto estructurado de IEC 61131-3, a partir de controladores de MPC diseñados en MATLAB y Simulink. Despliegue el código en diversas plataformas, tales como ECU, GPU y PLC.

“Sumitomo Construction Machinery logró reducir el consumo de combustible en un 15% sin sacrificar el rendimiento dinámico de la excavadora. El aumento de la eficiencia se debió, en parte, a una reducción del 50% en las fluctuaciones de velocidad del motor con Model Predictive Control Toolbox y las mejoras en nuestro diseño de sistemas de control.”.
Eisuke Matsuzaki, Sumitomo Heavy Industries
30 días de exploración a su alcance.
Díganos cómo podemos ayudar.
También puede seleccionar uno de estos países/idiomas:
América
Europa
Asia-Pacífico