Simulink Control Design
Linealice modelos y diseñe sistemas de control
¿Tiene preguntas? Comuníquese con ventas.
¿Tiene preguntas? Comuníquese con ventas.
Simulink Control Design permite diseñar y analizar sistemas de control modelados en Simulink. Puede ajustar automáticamente arquitecturas de control SISO y MIMO arbitrarias, incluyendo controladores PID. El ajuste automático de PID se puede desplegar en software integrado para calcular automáticamente las ganancias de PID en tiempo real. También puede implementar algoritmos de control de rechazo de perturbaciones activo, control de búsqueda del extremo y control adaptativo de referencia de modelos para aplicaciones en las que el controlador se debe adaptar a una dinámica de planta y perturbaciones cambiantes.
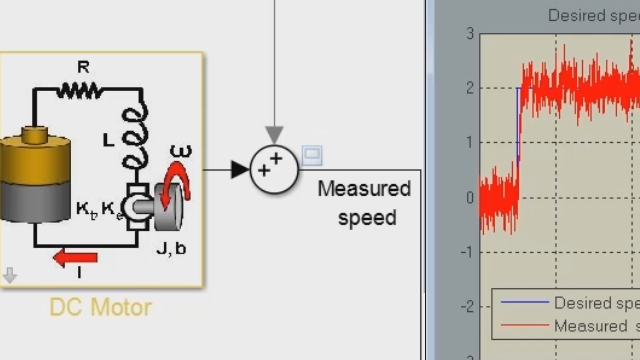
Puede buscar puntos operativos y calcular las linealizaciones exactas de los modelos de Simulink en diversas condiciones operativas. Simulink Control Design ofrece herramientas para calcular respuestas en frecuencia basadas en la simulación sin necesidad de modificar el modelo.
Ajuste automáticamente los controladores PID de un modelo de Simulink con la app PID Tuner. Despliegue y ejecute el algoritmo de ajuste de PID en hardware integrado mediante la generación de código C para el bloque Closed-Loop PID Autotuner.
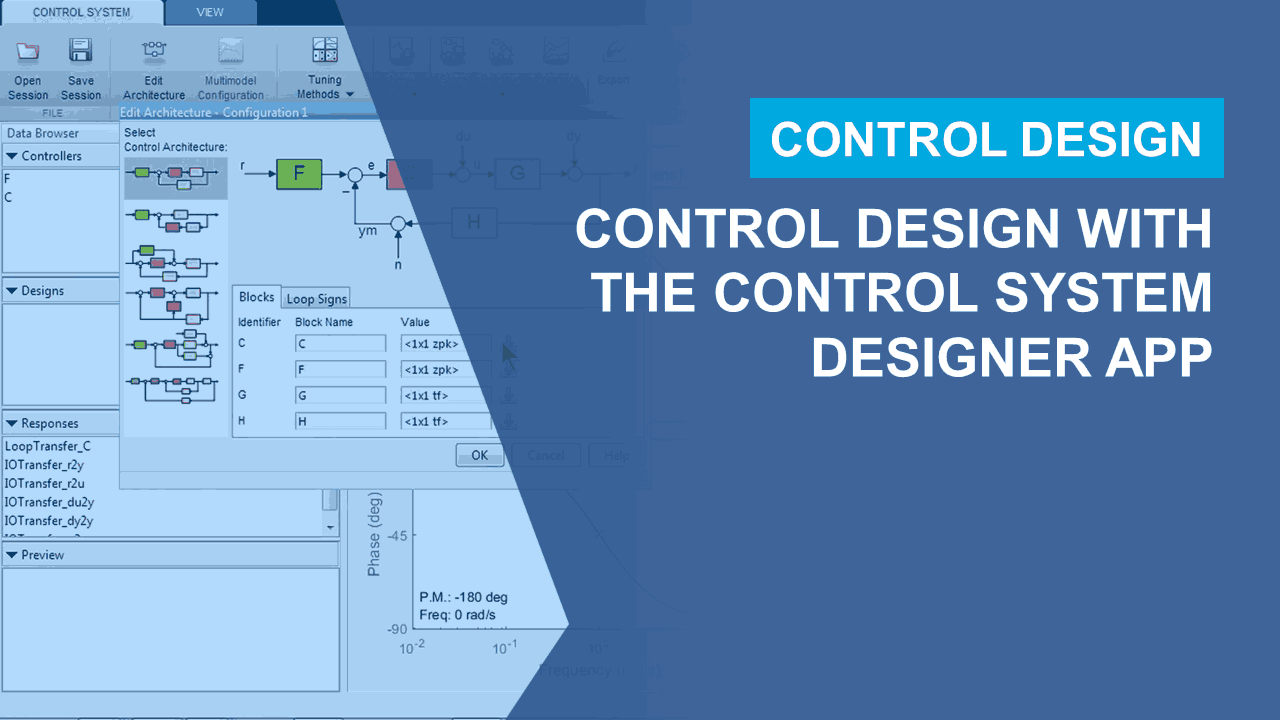
Ajuste lazos de control SISO en Simulink utilizando herramientas de ajuste gráficas y automáticas con la app Control System Designer.
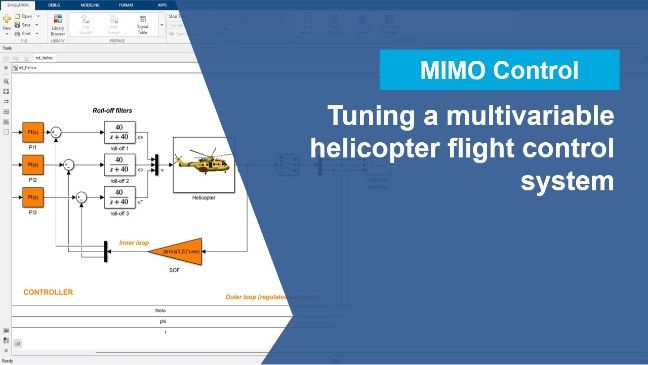
Ajuste automáticamente estructuras de control SISO y MIMO descentralizadas, modeladas en Simulink, para cumplir con los requisitos de diseño en los dominios del tiempo y la frecuencia con la app Control System Tuner.
Ajuste automáticamente controladores con planificación de ganancias para plantas no lineales o variantes en el tiempo para cumplir con los requisitos de rendimiento en toda la envolvente operativa de un sistema.

Implemente técnicas de control basadas en datos y aprendizaje con bloques de Simulink para control activo de rechazo de perturbaciones, control de búsqueda del extremo, control adaptativo de referencia de modelos y aplicación de restricciones.

Encuentre los puntos operativos de un modelo de Simulink con especificaciones o tiempos de simulación. Utilice la app Steady State Manager para ajustar un modelo de manera interactiva a partir de las especificaciones de estado, entrada y salida.

Linealice modelos de Simulink continuos, discretos y multifrecuencia con la app Model Linearizer. Identifique y corrija problemas de linealización comunes con el objeto LinearizationAdvisor.
Estime respuestas en frecuencia y examine características del dominio de la frecuencia de modelos de Simulink utilizando datos de E/S. Despliegue el algoritmo de estimación en forma de aplicación integrada para estimación en tiempo real de una planta física.
Utilice ejemplos de aplicación de referencia para sistemas de control de vuelo, electrónica de potencia, robótica y otras aplicaciones con el fin de diseñar y analizar controladores para sistemas modelados en Simulink.

"Las herramientas de MathWorks nos ayudaron a simplificar nuestro proceso de diseño proporcionándonos un entorno integrado para crear las funcionalidades técnicas innovadoras que exigen nuestros clientes".
Laurence Lane, Haldex
30 días de exploración a su alcance.
Obtenga información sobre precios y explore productos relacionados.
Es posible que su centro educativo ya ofrezca acceso a MATLAB, Simulink y otros productos complementarios mediante una infraestructura Campus-Wide License.
También puede seleccionar uno de estos países/idiomas:
América
Europa
Asia-Pacífico