Simscape permite crear rápidamente modelos de sistemas físicos dentro del entorno de Simulink. Con Simscape, puede crear modelos de componentes físicos basados en conexiones físicas que se integran directamente con diagramas de bloques y otros paradigmas de modelado. Puede modelar sistemas, tales como motores eléctricos, rectificadores de puente, actuadores hidráulicos y sistemas de refrigeración, agrupando los componentes fundamentales en un esquema. Las herramientas complementarias de Simscape ofrecen prestaciones de análisis y componentes más complejos.
Simscape ayuda a desarrollar sistemas de control y a probar el rendimiento en el nivel de sistema. Puede crear modelos de componentes personalizados con el lenguaje de Simscape basado en MATLAB, que permite la creación basada en texto de componentes, dominios y librerías de modelado físico. Puede parametrizar modelos mediante variables y expresiones de MATLAB, así como diseñar sistemas de control para un sistema físico en Simulink. Para desplegar modelos en otros entornos de simulación, como sistemas de hardware-in-the-loop (HIL), Simscape admite la generación de código C.

Esquemas multidominio
Construya modelos que abarcan múltiples dominios rápidamente. Las ecuaciones para la red de componentes mecánicos, eléctricos, hidráulicos y de otros tipos se derivan automáticamente.
Librerías integrales
Obtenga información sobre miles de componentes, que abarcan numerosos dominios físicos y niveles de fidelidad. Las librerías incluyen resistencias, válvulas, accionamientos eléctricos, transmisiones e intercambiadores de calor.

Lenguaje de modelado intuitivo
Cree componentes que se ajusten al comportamiento del sistema. Defina ecuaciones implícitas utilizando una sintaxis basada en MATLAB que incluye variables continuas y eventos discretos.
 transcrítico")
Simulación eficiente
Simscape formula las ecuaciones de todo el sistema físico. La manipulación simbólica, la reducción de índices y los solvers especializados se utilizan para la simulación de escritorio y en tiempo real.

Análisis minucioso
Navegue entre las gráficas de resultados y el modelo para investigar las causas del comportamiento observado. Identifique los ajustes que pueden ayudar a acelerar la simulación.

Despliegue de modelos
Convierta un modelo de Simscape en código C para probar los algoritmos de control mediante pruebas de HIL en dSPACE®, Speedgoat, OPAL-RT y otros sistemas en tiempo real.

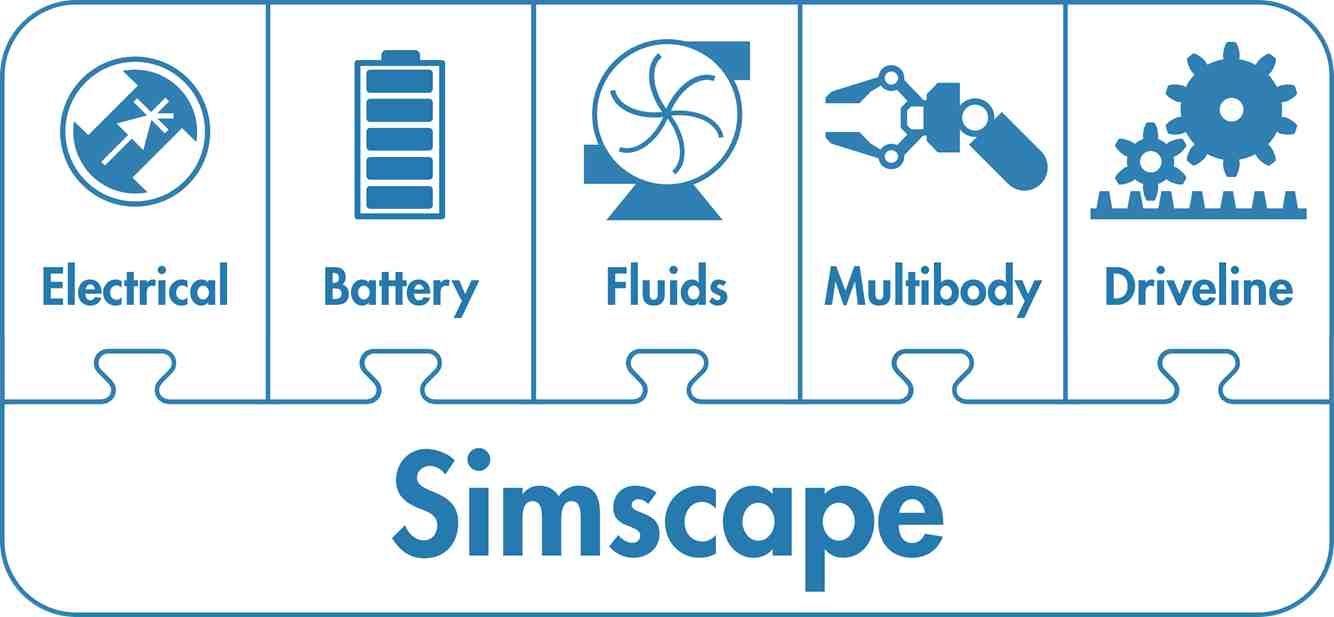
Línea de productos Simscape
Agregue soporte para la simulación mecánica en 3D, redes eléctricas trifásicas y otras prestaciones. Cree un modelo preciso con los datos más recientes de diseñadores de hardware.
MATLAB y Simulink
Utilice MATLAB para automatizar tareas de construcción, prueba y posterior procesamiento de modelos. Utilice Simulink para integrar algoritmos de control y diseño de hardware en un único entorno.

De la investigación a la producción
Los modelos de Simscape ayudan a ajustar requisitos, diseñar sistemas de control, probar controladores integrados y facilitar el funcionamiento en servicio como un gemelo digital.
Recursos del producto:
Línea de productos Simscape
La línea de productos Simscape ofrece modelos y tecnología de solvers para simular sistemas físicos. Modele sistemas de fluidos, eléctricos, mecánicos y otros sistemas físicos agrupando componentes en un esquema.
Simscape
Modele y simule sistemas físicos multidominio
Simscape Electrical
Modele y simule sistemas electrónicos, mecatrónicos y eléctricos
Simscape Battery
Diseñe y simule sistemas de gestión de baterías y almacenamiento de energía
Simscape Fluids
Modele y simule sistemas de fluidos
Simscape Driveline
Modele y simule sistemas mecánicos rotacionales y traslacionales
Simscape Multibody
Modele y simule sistemas mecánicos multicuerpo

"Con Simulink y Simscape Electrical, no es necesario escribir más código para resolver sistemas de ecuaciones de forma numérica. Basta con crear bloques personalizados, conectarlos gráficamente y el solver se encarga del resto. El equipo de ingeniería de la NASA que trabaja con nosotros prefiere los modelos de Simscape porque son más intuitivos que el código de bajo nivel".
Hector Hernández, Lockheed Martin
Obtenga una versión de prueba gratuita
30 días de exploración a su alcance.
¿Tiene interés en comprar?
Obtenga información sobre precios y explore productos relacionados.
¿Es estudiante?
Es posible que su centro educativo ya ofrezca acceso a MATLAB, Simulink y otros productos complementarios mediante una infraestructura Campus-Wide License.
Siguientes pasos



También puede seleccionar uno de estos países/idiomas:
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia-Pacífico
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)