balreal
Balanced state-space realization
Description
[
computes a balanced state-space realization of the LTI model sysb,g] = balreal(sys)sys. For
stable models, sys is an equivalent realization for which the
controllability and observability Gramians are equal and diagonal, their diagonal entries
forming the vector g of Hankel singular values. This balances the
input-to-state and state-to-output energy transfers, and small entries of
g indicate states that you can remove with xelim.
If sys has unstable poles, the function isolates the stable part,
balances it, and adds back to the unstable part to form sysb. The
entries of g corresponding to unstable modes are set to
Inf.
[
computes the balanced realization using options specified as one or more name-value
arguments. (since R2023b)sysb,g] = balreal(sys,Name=Value)
Examples
Balanced Realization of Stable System
Consider the following zero-pole-gain model, with near-canceling pole-zero pairs:
sys = zpk([-10 -20.01],[-5 -9.9 -20.1],1)
sys =
(s+10) (s+20.01)
----------------------
(s+5) (s+9.9) (s+20.1)
Continuous-time zero/pole/gain model.
Obtain a state-space realization with balanced Gramians.
[sysb,g] = balreal(sys);
Examine the diagonal entries of the joint Gramians.
g'
ans = 1×3
0.1006 0.0001 0.0000
This indicates that the last two states of sysb are weakly coupled to the input and output. You can then delete these states using xelim.
sysr = xelim(sysb,[2 3]);
This yields a first-order approximation of the original system.
zpk(sysr)
ans =
-0.00011597 (s-8638)
--------------------
(s+4.981)
Continuous-time zero/pole/gain model.
Compare the Bode responses of the original and reduced-order models.
opt = bodeoptions; opt.PhaseMatching = "on"; bodeplot(sys,sysr,'r--',opt)
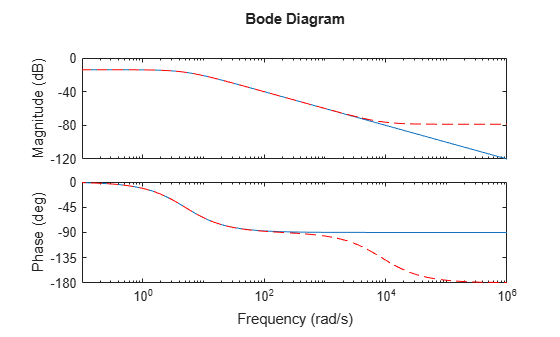
The plots shows that removing the second and third states does not have much effect on system dynamics.
For faster and more accurate results, use reducespec for model reduction workflows.
Balanced Realization of Unstable System
This example shows how to perform balanced realization of a system with unstable poles.
Consider the following system.
The system contains three stable and one unstable poles. One stable pole is really close to the stability boundary.
Create the model.
sys = ss(zpk(1,[-2 -1 1 -0.001],0.1));
Apply balreal to create a balanced realization.
[sysbal,g,TL,TR] = balreal(sys); g
g = 4×1
Inf
25.0374
0.0391
0.0018
If sys has unstable poles, balreal isolates the stable part, balances the stable part, and adds back the unstable part to form the balanced realization. The unstable pole shows up as Inf in the vector g.
You can also use the offset option to shift the stability boundary to exclude nominally stable poles.
[sysbal,g,TL,TR] = balreal(sys,Offset=1e-2); g
g = 4×1
Inf
Inf
0.0393
0.0018
For this realization, balreal treats the pole at s = –0.001 as unstable.
Input Arguments
Output Arguments
Tips
For model order reduction purposes, use reducespec.
Algorithms
Consider the stable state-space model
with controllability and observability Gramians Wc and Wo.
The state coordinate transformation produces the equivalent model
balreal transforms the Gramians to
such that
If the model has unstable poles, the function isolates the stable part, balances it, and
adds back to the unstable part to form the realization. The entries of g
corresponding to unstable modes are set to Inf.
See [1] and [2] for details on the algorithm.
If you use the TimeIntervals or FreqIntervals
options, then balreal bases the balanced realization on time-limited or
frequency-limited controllability and observability Gramians. For information about
calculating time-limited and frequency-limited Gramians, see gram and [4].
References
[1] Laub, A., M. Heath, C. Paige, and R. Ward. “Computation of System Balancing Transformations and Other Applications of Simultaneous Diagonalization Algorithms.” IEEE Transactions on Automatic Control 32, no. 2 (February 1987): 115–22. https://doi.org/10.1109/TAC.1987.1104549.
[2] Moore, B. “Principal Component Analysis in Linear Systems: Controllability, Observability, and Model Reduction.” IEEE Transactions on Automatic Control 26, no. 1 (February 1981): 17–32. https://doi.org/10.1109/TAC.1981.1102568.
[3] Laub, Alan J. “Computation of ‘Balancing’ Transformations.” Joint Automatic Control Conference, no. 17 (1980): 84. https://doi.org/10.1109/JACC.1980.4232165.
[4] Gawronski, Wodek, and Jer-Nan Juang. “Model Reduction in Limited Time and Frequency Intervals.” International Journal of Systems Science 21, no. 2 (February 1990): 349–76. https://doi.org/10.1080/00207729008910366.
Version History
Introduced before R2006aSee Also
reducespec | gram | xelim | ssequiv
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)