initial
Respuesta del sistema al modelo de espacio de estados inicial
Sintaxis
Descripción
Para los modelos de espacio de estados y de espacio de estados disperso, initial calcula la respuesta no forzada del sistema y a los estados iniciales x0.
Tiempo continuo:
Tiempo discreto:
Para los modelos lineales de tiempo variante o modelos de espacio de estados lineales de parámetros variantes, initial calcula la respuesta con el estado inicial x0, el parámetro inicial p0 (modelos LPV) y la entrada mantenida en el valor de desplazamiento (u(t) = u0(t) o u(t) = u0(t,p). Esto corresponde a la respuesta a la condición inicial de la dinámica lineal local.
Gráficas de respuesta inicial
initial( representa la respuesta no forzada del sistema a un modelo de espacio de estados inicial (sys,x0)ss) sys con una condición inicial de los estados que especifica el vector x0:
El modelo de espacio de estados sys puede ser de tiempo continuo o discreto, así como SISO o MIMO. En los sistemas de espacio de estados MIMO, la gráfica muestra las respuestas para las salidas de cada canal. initial determina automáticamente las unidades de tiempo y la duración de la simulación en función de la dinámica del sistema.
initial( especifica un color, un estilo de línea y un marcador para cada sistema de la gráfica de respuesta. Puede utilizar sys1,LineSpec1,...,sysN,LineSpecN,x0,___)LineSpec con cualquiera de las combinaciones de entrada/argumento anteriores. Cuando necesite opciones de personalización de gráficas adicionales, utilice en su lugar initialplot.
Datos de respuesta inicial
[ devuelve la respuesta de salida y,tOut,x] = initial(sys,x0)y, el vector de tiempo tOut y las trayectorias de estado x. El arreglo y tiene tantas filas como muestras de tiempo (longitud de tOut) y tantas columnas como salidas. Del mismo modo, x tiene length(tOut) filas y tantas columnas como estados.
Ejemplos
Gráfica de respuesta a las condiciones iniciales
Para este ejemplo, genere un modelo de espacio de estados aleatorio con 5 estados y cree la gráfica para la respuesta del sistema a los estados iniciales.
rng("default")
sys = rss(5);
x0 = [1,2,3,4,5];
initial(sys,x0)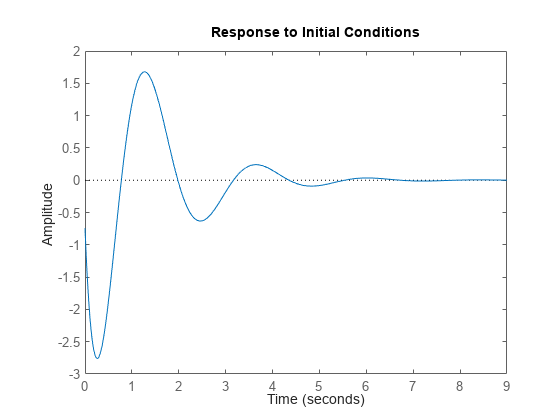
Respuesta del modelo de espacio de estados a la condición inicial
Represente la respuesta del siguiente modelo de espacio de estados:
Utilice la siguiente condición inicial:
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); initial(sys,x0)

Gráfica de respuesta a la condición inicial del sistema MIMO
Considere el siguiente sistema dinámico de dos entradas y dos salidas.
Convierta el modelo sys al formato de espacio de estados dado que las gráficas de respuesta a la condición inicial se admiten únicamente para modelos de espacio de estados.
sys = ss([0, tf([3 0],[1 1 10]) ; tf([1 1],[1 5]), tf(2,[1 6])]); size(sys)
State-space model with 2 outputs, 2 inputs, and 4 states.
El modelo de espacio de estados resultante tiene cuatro estados. Por tanto, proporcione un vector de la condición inicial con cuatro elementos.
x0 = [0.3,0.25,1,4];
Cree la gráfica de respuesta a la condición inicial.
initial(sys,x0);
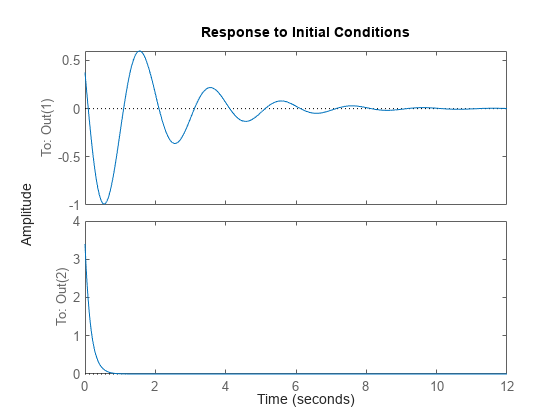
La gráfica resultante contiene dos subgráficas, una para cada salida de sys.
Gráfica de respuesta a las condiciones iniciales en un tiempo especificado
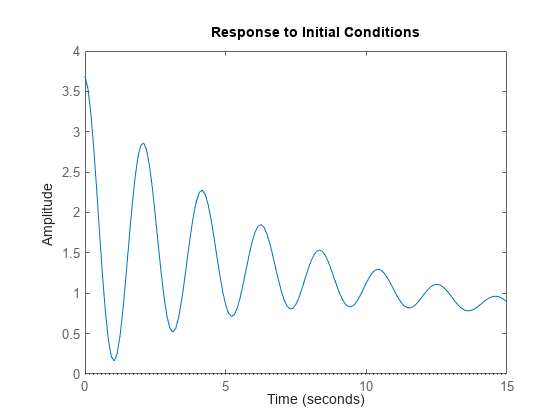
Para este ejemplo, examine la respuesta a la condición inicial del siguiente modelo cero-polo-ganancia y limite la gráfica a tFinal = 15 s.
En primer lugar, convierta el modelo zpk a un modelo ss, dado que initial solo admite modelos de espacio de estados.
sys = ss(zpk(-1,[-0.2+3j,-0.2-3j],1)*tf([1 1],[1 0.05])); tFinal = 15; x0 = [4,2,3];
Ahora, cree la gráfica de respuesta a las condiciones iniciales.
initial(sys,x0,tFinal);
Respuestas a la condición inicial de varios sistemas
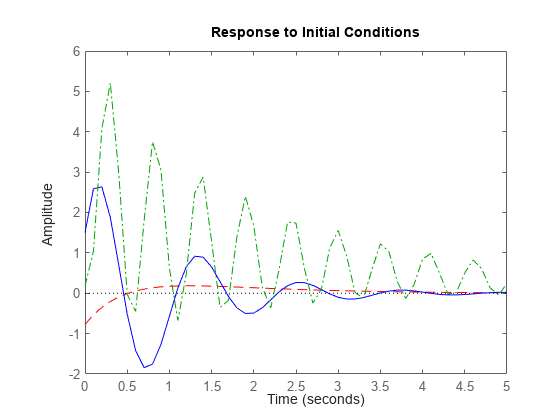
Para este ejemplo, represente las respuestas a la condición inicial de los tres sistemas dinámicos.
En primer lugar, cree los tres modelos y proporcione las condiciones iniciales. Todos los sistemas deberían contar con el mismo número de estados.
rng('default');
sys1 = rss(4);
sys2 = rss(4);
sys3 = rss(4);
x0 = [1,1,1,1];Represente las respuestas a la condición inicial de los tres modelos con el vector de tiempo t que abarca 5 segundos.
t = 0:0.1:5; initial(sys1,'r--',sys2,'b',sys3,'g-.',x0,t)
Datos de respuesta a la condición inicial del modelo de espacio de estados
Extraiga los datos de respuesta a la condición inicial del siguiente modelo de espacio de estados con dos estados:
Utilice las siguientes condiciones iniciales:
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); [y,tOut,x] = initial(sys,x0);
El arreglo y tiene tantas filas como muestras de tiempo (longitud de tOut) y tantas columnas como salidas. Del mismo modo, x tiene tantas filas como muestras de tiempo (longitud de tOut) y tantas columnas como estados.
Datos de respuesta a la condición con tiempo especificado
Para este ejemplo, extraiga los datos de respuesta a la condición inicial de un modelo de espacio de estados con 6 estados, 3 salidas y 2 entradas.
En primer lugar, cree el modelo y proporcione las condiciones iniciales.
rng('default');
sys = rss(6,3,2);
x0 = [0.1,0.3,0.05,0.4,0.75,1];Extraiga las respuestas a la condición inicial del modelo con el vector de tiempo t que abarca 15 segundos.
t = 0:0.1:15; [y,tOut,x] = initial(sys,x0,t);
El arreglo y tiene tantas filas como muestras de tiempo (longitud de tOut) y tantas columnas como salidas. Del mismo modo, x tiene tantas filas como muestras de tiempo (longitud de tOut) y tantas columnas como estados.
Respuesta inicial de un modelo de espacio de estados de parámetros lineales variables
Para este ejemplo, considere lpvHCModel.m que define el siguiente modelo.
Utilice lpvss para construir esta planta LPV. Dado que es infinito para , recorte al rango para alejarse de la singularidad.
pmax = 0.99; vSys = lpvss('p',@(t,p) lpvHCModel(t,p,pmax),'StateName','x');
Puede calcular la respuesta inicial de este modelo a lo largo de una trayectoria .
Defina implícitamente como una función de tiempo , estado y entrada . Para este modelo, use .
pinit = 0.5;
xinit = 0.5;
t= linspace(0,1,100);
p = @(t,x,u) tanh(x);
initial(vSys,{xinit,pinit},t,p);
initial calcula la respuesta con el estado inicial, el parámetro inicial y la entrada mantenida en el valor de desplazamiento .
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido antes de R2006a
Consulte también
initialplot | impulse | lsim | Linear System Analyzer | step
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)