sigma
Gráfica de valores singulares de un sistema dinámico
Sintaxis
Descripción
sigma( representa los valores singulares de la respuesta en frecuencia de un modelo de sistema dinámico sys)sys. sigma determina automáticamente las frecuencias para representar en función de la dinámica del sistema.
Si sys es un modelo de una única entrada y una única salida (SISO), la gráfica de valores singulares es entonces similar a su respuesta de la magnitud de Bode.
Si sys es un modelo de múltiples entradas y múltiples salidas (MIMO) con Nu entradas y Ny salidas, la gráfica de valores singulares muestra min(Nu,Ny) líneas en la gráfica correspondiente a cada valor singular de la matriz de respuesta en frecuencia. En los sistemas MIMO, la gráfica de valores singulares amplía la respuesta de la magnitud de Bode y resulta útil en el análisis de robustez.
Si sys es un modelo con coeficientes complejos, entonces:
En la escala de frecuencia logarítmica, el diagrama muestra dos ramas, una para frecuencias positivas y otra para frecuencias negativas. El diagrama también muestra flechas que indican la dirección de los valores de frecuencia que aumentan para cada rama. Consulte Gráfica de valores singulares de un modelo con coeficientes complejos.
La escala de frecuencia lineal, el diagrama muestra una única rama con un rango de frecuencia simétrico centrado en un valor de frecuencia de cero.
sigma(___, representa valores singulares de la respuesta de sistema para frecuencias especificadas por w)w.
Si
wes un arreglo de celdas en formato{wmin,wmax}, entoncessigmarepresenta la respuesta en frecuencias entrewminywmax.Si
wes un vector de frecuencias, entoncessigmarepresenta la respuesta en cada frecuencia especificada. El vectorwpuede contener frecuencias negativas y positivas.
Puede utilizar w con cualquiera de las combinaciones de entrada/argumento de sintaxis anteriores.
sigma(___, representa las respuestas de los valores singulares modificadas en función del argumento type)type. Especifique type de la siguiente manera:
1para representar los valores singulares de la respuesta en frecuencia H-1, donde H es la respuesta en frecuencia desys.2para representar los valores singulares de la respuesta en frecuencia I+H.3para representar los valores singulares de la respuesta en frecuencia I+H-1.
Solo puede utilizar el argumento type para sistemas cuadrados, es decir, los sistemas que cuenten con el mismo número de entradas y salidas.
[ devuelve los valores singulares de la respuesta en cada frecuencia del vector sv,wout] = sigma(sys)wout. La salida sv es una matriz y el valor sv(:,k) proporciona los valores singulares en un orden descendente en la frecuencia wout(k). La función determina automáticamente frecuencias de wout en función de la dinámica del sistema. Esta sintaxis no crea una gráfica.
Ejemplos
Gráfica de valores singulares de un sistema dinámico
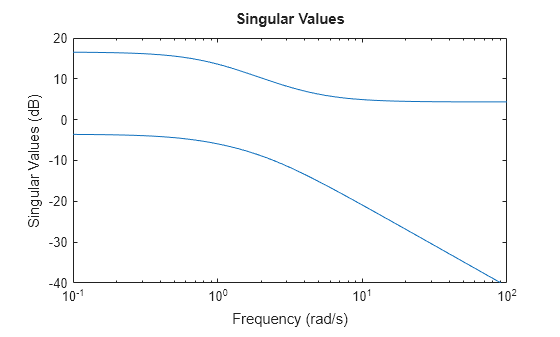
Cree una gráfica de valores singulares del siguiente sistema dinámico SISO de tiempo continuo.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); sigma(H)
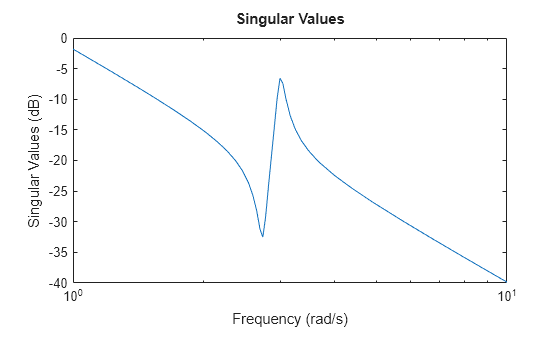
sigma selecciona automáticamente el rango del diagrama en función de la dinámica del sistema.
Gráfica sigma en frecuencias especificadas
Cree una gráfica de valores singulares sobre un rango de frecuencia especificado. Utilice este enfoque cuando desee centrarse en la dinámica de un rango de frecuencia en particular.
H = tf([-0.1,-2.4,-181,-1950],[1,3.3,990,2600]);
sigma(H,{1,100})
grid on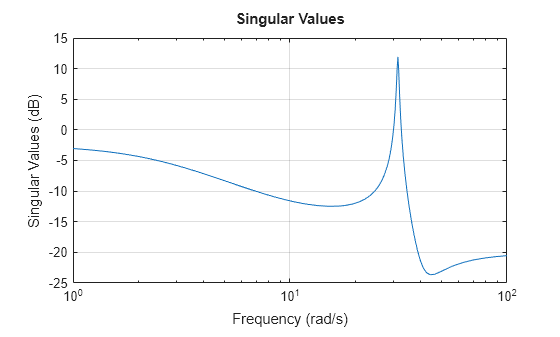
El arreglo de celdas {1,100} especifica el valor de frecuencia mínimo y máximo de la gráfica. Cuando establece límites de frecuencia de esta manera, la función selecciona los puntos intermedios para los datos de respuesta en frecuencia.
Como alternativa, especifique un vector de puntos de frecuencia para utilizar cuando evalúe y represente la respuesta en frecuencia.
w = [1 5 10 15 20 23 31 40 44 50 85 100]; sigma(H,w,'.-') grid on

sigma representa la respuesta en frecuencia solo en las frecuencias especificadas.
Comparar gráficas de valores singulares de varios sistemas dinámicos
Compare la respuesta en frecuencia de un sistema de tiempo continuo con un sistema discretizado equivalente en la misma gráfica de valores singulares.
Cree sistemas dinámicos de tiempo continuo y tiempo discreto.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]);
Hd = c2d(H,0.5,'zoh');Cree una gráfica que muestre ambos sistemas.
sigma(H,Hd)
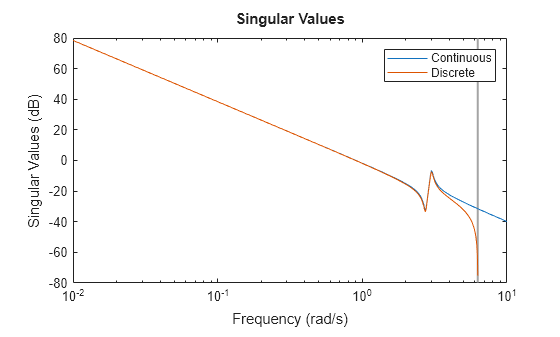
La gráfica sigma de un sistema de tiempo discreto incluye una línea vertical que marca la frecuencia Nyquist del sistema.
Gráfica de valores singulares con atributos de línea especificados
Especifique el estilo de línea, el color o el marcador en cada sistema de una gráfica sigma utilizando el argumento de entrada LineSpec.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); Hd = c2d(H,0.5,'zoh'); sigma(H,'r',Hd,'b--')
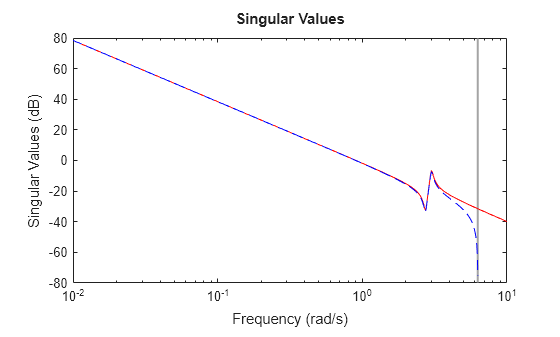
La primera LineSpec, 'r', especifica una línea continua roja para la respuesta de H. La segunda LineSpec, 'b--', especifica una línea discontinua azul para la respuesta de Hd.
Obtener datos de valores singulares
Calcule los valores singulares de la respuesta en frecuencia de un sistema SISO.
Si no especifica frecuencias, sigma elige frecuencias en función de la dinámica del sistema y las devuelve en el segundo argumento de salida.
H = tf([1 0.1 7.5],[1 0.12 9 0 0]); [sv,wout] = sigma(H);
Dado que H es un modelo SISO, la primera dimensión de sv es 1. La segunda dimensión es el número de frecuencias de wout.
size(sv)
ans = 1×2
1 40
length(wout)
ans = 40
De este modo, cada entrada a lo largo de la segunda dimensión de sv proporciona los valores singulares de la respuesta en la correspondiente frecuencia de wout.
Valores singulares de un sistema MIMO
Para este ejemplo, cree un sistema de dos salidas y tres entradas.
rng(0,'twister'); % For reproducibility H = rss(4,2,3);
En este sistema, sigma representa los valores singulares de la matriz de la respuesta en frecuencia en la misma gráfica.
sigma(H)
Calcule los valores singulares en 20 frecuencias entre 1 y 10 radianes.
w = logspace(0,1,20); sv = sigma(H,w);
sv es una matriz, en la que las filas se corresponden con los valores singulares de la matriz de respuesta en frecuencia y las columnas son valores de frecuencia. Examine las dimensiones.
size(sv)
ans = 1×2
2 20
De este modo, por ejemplo, sv(:,10) son los valores singulares de la respuesta calculados en la 10.ª frecuencia de w.
Calcular y representar valores singulares
Considere el siguiente sistema dinámico de dos entradas y dos salidas.
Calcule las respuestas de valores singulares de H(s) e I + H(s).
H = [0, tf([3 0],[1 1 10]) ; tf([1 1],[1 5]), tf(2,[1 6])]; [svH,wH] = sigma(H); [svIH,wIH] = sigma(H,[],2);
En el último comando, la entrada 2 selecciona el segundo tipo de respuesta: I + H(s). Los vectores svH y svIH contienen los datos de respuesta de los valores singulares en las frecuencias en wH y wIH.
Represente las respuestas de los valores singulares de ambos sistemas.
subplot(211) sigma(H) subplot(212) sigma(H,[],2)

Gráfica de valores singulares de un modelo con coeficientes complejos
Cree una gráfica de valores singulares de un modelo con coeficientes complejos y un modelo con coeficientes reales en la misma gráfica.
rng(0) A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D); Gr = rss(4); sigma(Gc,Gr) legend('Complex-coefficient model','Real-coefficient model')
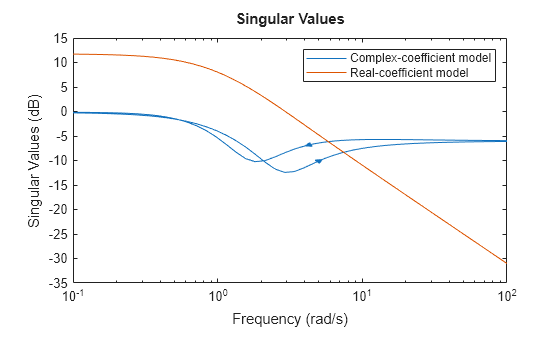
En la escala de frecuencia logarítmica, la gráfica muestra dos ramas para modelos con coeficientes complejos, una para las frecuencias positivas, con una flecha que apunta hacia la derecha, y otra para las frecuencias negativas, con una flecha que apunta hacia la izquierda. En ambas ramas, las flechas indican la dirección de las frecuencias que aumentan. Las gráficas para modelos con coeficientes reales siempre contienen una única rama sin flechas.
Puede modificar la escala de frecuencia de la gráfica haciendo clic con el botón secundario en la gráfica y seleccionando Properties. En el diálogo del editor de propiedades, en la pestaña Units, establezca la escala de frecuencia en linear scale. Como alternativa, puede utilizar la función sigmaplot con un objeto sigmaoptions para crear un diagrama personalizado.
opt = sigmaoptions;
opt.FreqScale = 'Linear';Cree el diagrama con opciones personalizadas.
sigmaplot(Gc,Gr,opt) legend('Complex-coefficient model','Real-coefficient model')
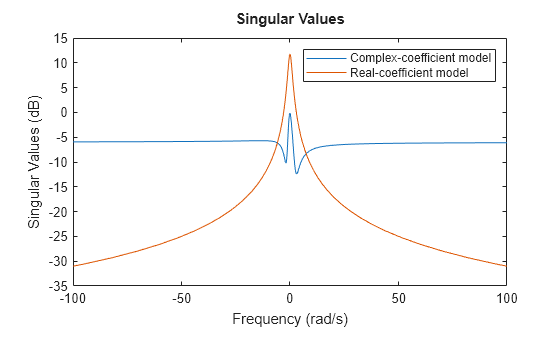
En la escala de frecuencia lineal, el diagrama muestra una única rama con un rango de frecuencia simétrico centrado en un valor de frecuencia de cero. La gráfica también muestra la respuesta en frecuencia negativa de un modelo con coeficientes reales cuando representa la respuesta junto con un modelo con coeficientes complejos.
Argumentos de entrada
Argumentos de salida
Sugerencias
Cuando necesite opciones de personalización de gráficas adicionales, utilice en su lugar
sigmaplot.
Algoritmos
sigma utiliza la función MATLAB® de svd para calcular los valores singulares de la respuesta en frecuencia compleja.
En un modelo
frd,sigmacalcula los valores singulares desys.ResponseDataen las frecuenciassys.Frequency.Para los modelos de tiempo continuo
tf,ssozpkcon función de transferencia H(s),sigmacalcula los valores singulares de H(jω) como una función de la frecuencia ω.En los modelos de tiempo discreto
tf,ssozpkcon función de transferencia H(z) y tiempo de muestreo Ts,sigmacalcula los valores singulares depara frecuencias ω entre 0 y la frecuencia Nyquist ωN = n/Ts.
Historial de versiones
Introducido antes de R2006a
Consulte también
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)