Vehicle Path Planner System

Libraries:
Model Predictive Control Toolbox
Description
The Vehicle Path Planner System block simulates a vehicle path planner (VPP) system that plans a collision-free trajectory from an initial pose to a target pose using a multistage nonlinear MPC controller. You can use this block to plan a path for a vehicle, such as a vehicle entering and exiting a parking spot or a robot moving in a warehouse.
Once you plan a path, you can have the vehicle track the path using a path-following control system.
To customize your controller, for example, to modify the controller cost function or change the controller initial conditions, click Create VPP subsystem.
Examples

Plan Parallel Parking Path Using Multistage Nonlinear Model Predictive Control
You can plan a parking path for a vehicle using the Vehicle Path Planner System block.
Parking Valet Using Multistage Nonlinear Model Predictive Control
Design controller for parking garage valet using nonlinear model predictive control.
Ports
Input
Specify the initial vehicle pose as the vector signal [x0 y0 θ0], where:
(x0, y0) is the initial position for the center of the vehicle rear axle.
θ0 is the initial vehicle yaw angle.
Specify the target vehicle pose as the vector signal [xt yt θt], where:
(xt, yt) is the target position for the center of the vehicle rear axle.
θt is the initial vehicle yaw angle.
To plan a path using the current pose, target pose, and obstacles, enable the path planner by setting this signal to a positive value.
When planning is complete, set the enable signal to zero, which resets the nonlinear MPC controller.
The time for which the path planner block is enabled must be:
Longer than the worst-case execution time of the planner. To guarantee a worst-case execution time, configure the planning controller to apply a suboptimal solution after a specified maximum number of iterations by selecting the Use suboptimal solution parameter.
Shorter than the sample time of the controller, as specified using the Sample time parameter.
Specify obstacle information as a matrix with N rows, where N is equal to the Number of obstacles parameter. Each row contains the following information for an obstacle in the order [X Y Φ L W]:
(X, Y) — Position, specified in meters
Φ — Yaw angle, specified in radians
L — Length, specified in meters
W — Width, specified in meters
Dependencies
To enable this port, select the corresponding Use external source parameter.
Vehicle velocity range in meters per second, specified as the two-element row vector [Vmin Vmax], where:
Vmin is the minimum vehicle velocity.
Vmax is the maximum vehicle velocity.
Dependencies
To enable this port, select the corresponding Use external source parameter.
Front steering angle range in radians, specified as the two-element row vector [ψmin ψmax], where:
ψmin is the minimum steering angle.
ψmax is the maximum steering angle.
The front steering angle is the angle between the front tires and the longitudinal axis of the vehicle. The steering angle is positive toward the positive lateral axis of the ego vehicle.
Dependencies
To enable this port, select the corresponding Use external source parameter.
Output
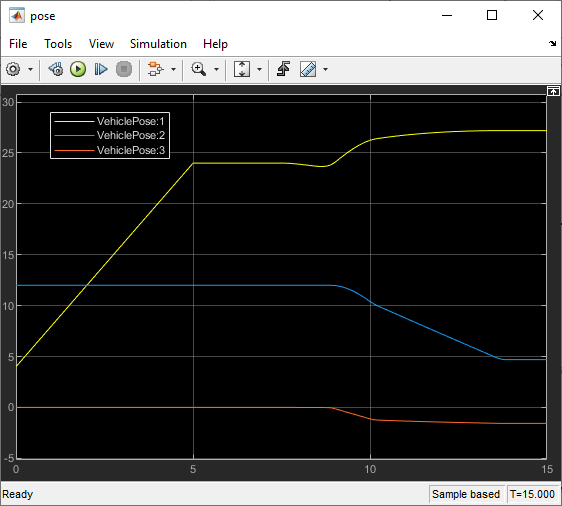
Planned vehicle path, output as a three column matrix. Each row contains one vehicle pose [x y θ] along the vehicle path, where:
(x, y) is the position for the center of the vehicle rear axle.
θ is the vehicle yaw angle.
The optimization status of the nonlinear MPC controller, output as an integer as follows:
Positive — Optimal solution found
0— Maximum number of optimization iterations reached, solution might not be optimalNegative — Infeasible optimization problem
Dependencies
To enable this port, select the Optimization status parameter.
Parameters
Parameters Tab
Vehicle length, specified in meters.
Programmatic Use
Block Parameter:
egoLength |
| Type: string, character vector |
Default:
"4.7" |
Vehicle width, specified in meters.
Programmatic Use
Block Parameter:
egoWidth |
| Type: string, character vector |
Default:
"1.8" |
The distance between the front and rear axles, specified in meters.
Programmatic Use
Block Parameter:
wheelbase |
| Type: string, character vector |
Default:
"2.8" |
The longitudinal distance from the center of the vehicle to the rear axle, specified in meters.
Programmatic Use
Block Parameter:
dist2Center |
| Type: string, character vector |
Default:
"1.4" |
The number of obstacles in the environment.
Programmatic Use
Block Parameter:
numObs |
| Type: string, character vector |
Default:
"0" |
Specify obstacle information as a matrix with N rows, where N is equal to the Number of obstacles parameter. Each row contains the following information for an obstacle in the order [X Y Φ L W]:
(X, Y) — Position, specified in meters
Φ — Yaw angle, specified in radians
L — Length, specified in meters
W — Width, specified in meters
If the obstacle positions and orientations vary over time, add the Obstacles input port to the block by selecting Use external source.
Dependencies
To enable this parameter, set the Number of obstacles parameter to a nonzero value.
Programmatic Use
Block Parameter:
obsMat |
| Type: string, character vector |
Default:
"zeros(1,5)" |
Programmatic Use: Use external source
Block Parameter:
obs_ext |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
Minimum safe distance between the ego vehicle and any obstacle in the environment, specified in meters.
Dependencies
To enable this parameter, set the Number of obstacles parameter to a nonzero value.
Programmatic Use
Block Parameter:
minDist |
| Type: string, character vector |
Default:
"0.1" |
Controller sample time, specified in seconds.
Programmatic Use
Block Parameter:
Ts |
| Type: string, character vector |
Default:
"1" |
Prediction horizon steps for planning. The total prediction time is the product of the sample time and the prediction horizon.
Programmatic Use
Block Parameter:
pPlanning |
| Type: string, character vector |
Default:
"20" |
Vehicle velocity range in meters per second, specified as the two-element row vector [Vmin Vmax], where:
Vmin is the minimum vehicle velocity.
Vmax is the maximum vehicle velocity.
If the velocity range varies over time, add the Velocity range input port to the block by selecting Use external source.
Programmatic Use
Block Parameter:
v_range |
| Type: string, character vector |
Default:
"[-6.5,6.5]" |
Programmatic Use: Use external source
Block Parameter:
v_ext |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
Front steering angle range in radians, specified as the two-element row vector [ψmin ψmax], where:
ψmin is the minimum steering angle.
ψmax is the maximum steering angle.
The front steering angle is the angle of the front tires from the longitudinal axis of the vehicle. The steering angle is positive toward the positive lateral axis of the ego vehicle.
If the steering angle range varies over time, add the Steering angle range input port to the block by selecting Use external source.
Programmatic Use
Block Parameter:
steer_range |
| Type: string, character vector |
Default:
"[-pi/4,pi/4]" |
Programmatic Use: Use external source
Block Parameter:
steer_ext |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
Block Tab
Configure the controller to apply a suboptimal solution after a specified maximum number of iterations, which guarantees the worst-case execution time for your planning controller. To set the maximum number of iterations, use the Maximum iteration number parameter.
For more information, see Suboptimal QP Solution.
Programmatic Use
Block Parameter:
suboptimal |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
Maximum number of optimization iterations.
Dependencies
To enable this parameter, select the Use suboptimal solution parameter.
Programmatic Use
Block Parameter:
maxIter |
| Type: string, character vector |
Default:
"200" |
Select this parameter to add the Exitflag output port to the block.
Programmatic Use
Block Parameter:
output_exitflag |
| Type: string, character vector |
Values:
"off" | "on" |
Default:
"off" |
Generate a custom VPP subsystem, which you can modify for your application. The configuration data for the custom controller is exported to the MATLAB® workspace as a structure.
Extended Capabilities
Usage notes and limitations:
Code generation for single-precision or fixed-point computations is not supported.
In the Configuration Parameters dialog box, on the Code Generation > Interface pane, you must select the following parameters.
Support non-finite numbers — This parameter is selected by default.
Support variable-size signals when using Embedded Coder® — This parameter is not selected by default.
Version History
Introduced in R2022b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: .
También puede seleccionar uno de estos países/idiomas:
Cómo obtener el mejor rendimiento
Seleccione China (en idioma chino o inglés) para obtener el mejor rendimiento. Los sitios web de otros países no están optimizados para ser accedidos desde su ubicación geográfica.
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)