Esta página es para la versión anterior. La página correspondiente en inglés ha sido eliminada en la versión actual.
Diseño de algoritmos para manipuladores
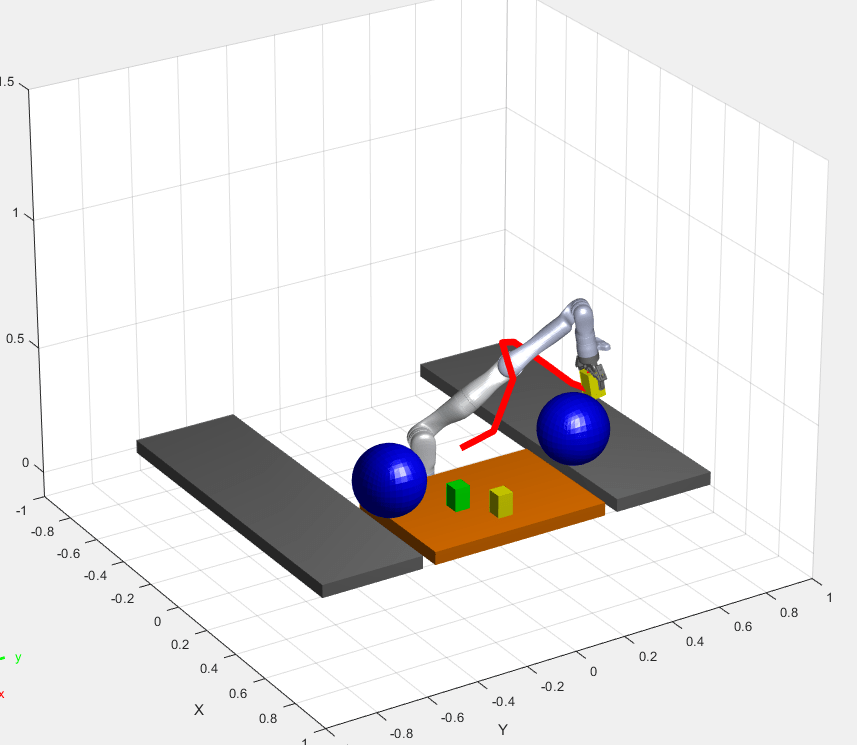
Los algoritmos para manipuladores de Robotics System Toolbox™ admiten flujos de trabajos relacionados con robots de cuerpo rígido, articulados y de enlace serie. Puede importar modelos de robot a partir de archivos URDF y modelos Simscape™ Multibody™ utilizando importrobot, o cargar un modelo existente con loadrobot. Utilice estos modelos de robot para una amplia variedad de tareas de robótica:
Defina los modelos de robot utilizando un objeto rigidBodyTree compuesto de cuerpos rígidos con articulaciones fijas, giratorias o prismáticas. Genere configuraciones de articulaciones, defina propiedades dinámicas para efectos inerciales y use modelos de movimiento en el espacio cartesiano y articular para simular el movimiento del robot.
Calcule cinemáticas inversas para obtener configuraciones de articulaciones en base a la posición de las extremidades deseadas. Además de los parámetros del modelo del robot, especifique otras restricciones como apuntamiento, límites cartesianos o poses objetivo.
Realice la planificación de trayectorias usando los modelos de robot y el planificador de rutas de árboles aleatorios de exploración rápida (RRT).
Genere trayectorias basadas en waypoints y en otros parámetros con perfiles de velocidad trapezoidal, B-splines o trayectorias polinómicas.
Compruebe si se producen colisiones con obstáculos del entorno para garantizar que el robot se mueve de forma segura y efectiva.
Categorías
- Modelos de robot
Modelos de árbol de cuerpo rígido, cinemáticas directas, dinámicas y modelos de movimiento en el espacio cartesiano y articular
- Cinemática inversa
Cinemática inversa para manipuladores, restricciones cinemáticas
- Planificación de trayectorias de manipuladores
Planificación de rutas mediante RRT y árboles de cuerpo rígido
- Generación y seguimiento de trayectorias
Controlar las articulaciones del manipulador para realizar un seguimiento de la trayectoria
- Detección de colisiones
Mallas de geometrías de colisión, prevención de colisiones y franqueamiento de obstáculos
Ejemplos destacados


You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)