CAN
Comunicación utilizando el protocolo CAN
Controller Area Network (CAN) es un protocolo de comunicación sólido que permite la comunicación entre múltiples dispositivos. Puede utilizar las funcionalidades de CAN para diseñar e implementar de manera eficiente sistemas de comunicación basados en CAN sólidos y fiables.
Bloques
| CAN Transmit | Transmit message to CAN network |
| CAN Receive | Receive message from CAN network |
| On-board CAN Receive | Receive messages using on-board Arduino CAN controller (Desde R2024b) |
| On-board CAN Transmit | Transmit messages to CAN network using on-board Arduino CAN controller (Desde R2024b) |
Ajustes de modelos
Ejemplos destacados
Transmit and Receive Data Using Arduino CAN Blocks
Use Simulink® Support Package for Arduino® Hardware to transmit and receive data from the CAN network using the specified CAN device.
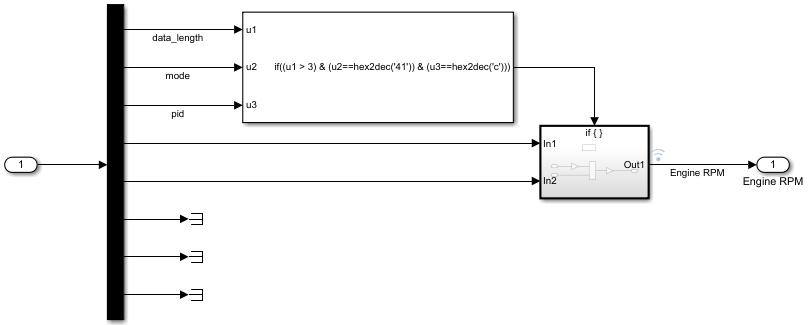
Monitor Engine RPM Using Arduino CAN Blocks
Use Simulink® Support Package for Arduino® Hardware to monitor vehicle engine RPM using Arduino CAN blocks.