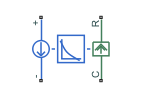
Generic Linear Actuator
Generic linear actuator driven from DC voltage source or PWM driver
Libraries:
Simscape /
Electrical /
Electromechanical /
Mechatronic Actuators
Description
The Generic Linear Actuator block implements a model of a generic linear actuator designed to be driven from a DC voltage source or a PWM driver. Define force-speed characteristics in terms of tabulated values for powering the motor at the rated voltage. This functionality enables you to model a motor without referencing an equivalent circuit.
The motor or actuator architecture determines the way in which electrical losses depend on force. For example, a DC motor has losses that are proportional to the square of the current. As force is proportional to current, losses are also proportional to mechanical force. Most motors have an electrical loss term that is proportional to the square of mechanical force. The Generic Linear Actuator block calculates this loss term using the Motor efficiency (percent) and Speed at which efficiency is measured parameters that you provide.
Some motors also have a loss term that is independent of force. An example is a shunt motor where the field winding draws a constant current regardless of load. The Force-independent electrical losses parameter accounts for this effect.
The motor efficiency is the mechanical power divided by the sum of the mechanical power and both electrical loss terms. The block assumes that the speed at which the motor efficiency is defined is in the motoring quadrant and, therefore, positive.
You can operate the block in the reverse direction by changing the sign of the voltage applied. The H-Bridge block, for example, reverses motor direction if the voltage at the REV port is greater than the Reverse threshold voltage parameter. However, if you are using the block in reverse, specify the force-speed data for forward operation:
Positive forces and positive speeds in the motoring quadrant.
Positive force and negative speeds in the generating counterclockwise quadrant.
Negative force and positive speed in the generating clockwise quadrant.
Model Thermal Effects
You can expose the thermal port to model the effects of losses that convert power to heat. To expose the thermal port, set the Modeling option parameter to either:
No thermal port— The block does not contain a thermal port.Show thermal port— The block contains one thermal conserving port.
For more information about using thermal ports in actuator blocks, see Simulating Thermal Effects in Rotational and Translational Actuators.
Assumptions and Limitations
The force-speed curve data corresponds only to the rated voltage, so the block produces accurate results only when driven by plus or minus the rated voltage.
The block requires you to provide force-speed data for the full range over which you use the actuator. To use the actuator in the generating and braking regions, provide additional data outside of the normal motoring region.
Model behavior is sensitive to force-speed data. For example, no-load speed is correctly defined and finite only when the data crosses the speed axis.
To drive the block from the H-Bridge block:
Do not place any other blocks between the H-Bridge and the Generic Linear Actuator blocks.
In the H-Bridge block dialog box, set the Freewheeling mode to
Via one semiconductor switch and one freewheeling diode. SelectingVia two freewheeling diodesdoes not set the bridge output voltage to zero when the PWM input signal is low.In the H-Bridge, Generic Linear Actuator, and Controlled PWM Voltage block dialog boxes, ensure that the Simulation mode is the same for all three blocks.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2009b