Induction Machine Direct Torque Control
Induction machine DTC

Libraries:
Simscape /
Electrical /
Control /
Induction Machine Control
Description
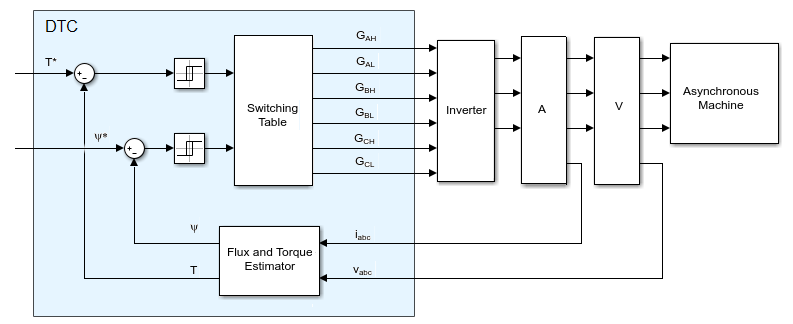
The Induction Machine Direct Torque Control block implements an induction machine direct torque control (DTC) structure. The figure shows the equivalent circuit for the block.
Equations
To estimate the torque and flux, the Induction Machine Direct Torque Control block discretizes the machine voltage equations in the stationary ɑβ reference frame using the backward Euler method. The discrete-time equations for stator fluxes in the ɑβ frame are:
and
where:
vɑ is ɑ-axis voltage.
iɑ is ɑ-axis current.
Rs is the stator resistance.
Ψɑ is the ɑ-axis stator flux.
vβ is β-axis voltage.
iβ is β-axis current.
Ψβ is the β-axis stator flux.
The block calculates the torque and flux as:
and
where:
p is the number of pole pairs.
Ψs is the stator flux.
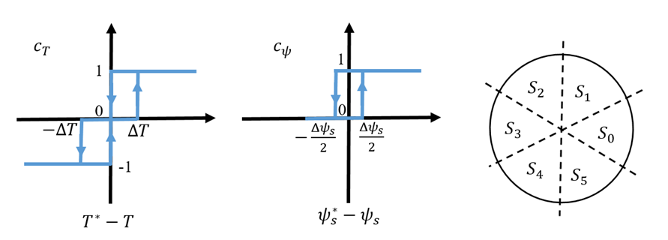
To detect flux and torque estimation errors, the block uses hysteresis comparators. The figure shows hysteresis comparators and the associated switching sectors.
The table shows the optimum switching for an inverter high-side system.
| cΨ, cTS(θ) | S0 | S1 | S2 | S3 | S4 | S5 | |
|---|---|---|---|---|---|---|---|
| cΨ = 1 | cT = 1 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 |
| cT = 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | |
| cT = -1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | |
| cΨ = 0 | cT = 1 | 0, 1, 0 | 0, 1, 1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 |
| cT = 0 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | 0, 0, 0 | 1, 1, 1 | |
| cT = -1 | 0, 0, 1 | 1, 0, 1 | 1, 0, 0 | 1, 1, 0 | 0, 1, 0 | 0, 1, 1 | |
Assumptions and Limitations
The power inverter dead times are not considered. For hardware implementation, add the dead time externally.
Examples

Asynchronous Machine Direct Torque Control
Control an asynchronous machine (ASM) using the direct-torque control method. A PI-based speed controller supplies the torque reference. The direct-torque controller generates the inverter pulses.
Ports
Input
Output
Parameters
References
[1] Takahashi, I., and T. Noguchi. "A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor." IEEE Transactions on Industry Applications. Vol. IA-22, Number 5, 1986, pp. 820 - 827.
Extended Capabilities
Version History
Introduced in R2017b
See Also
Blocks
- Induction Machine Current Controller | Induction Machine Direct Torque Control (Single-Phase) | Induction Machine Direct Torque Control with Space Vector Modulator | Induction Machine Field-Oriented Control | Induction Machine Field-Oriented Control (Single-Phase) | Induction Machine Flux Observer | Induction Machine Scalar Control