Control de motores de CC
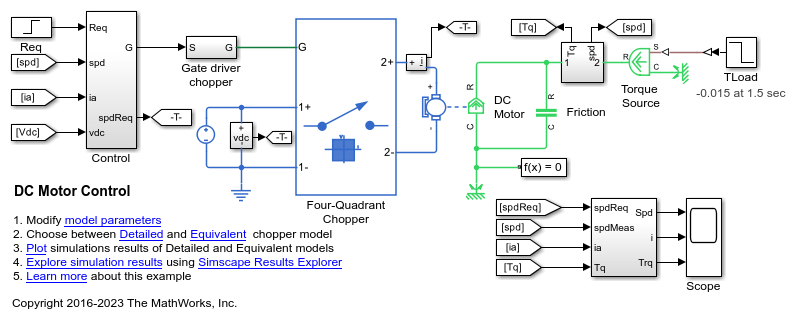
Este ejemplo muestra una estructura de control de velocidad en cascada para un motor de CC. Se utiliza un seccionador de cuatro cuadrantes controlado por PWM para alimentar al motor de CC. El subsistema Control incluye el bucle de control de velocidad externo, el bucle de control de corriente interno y la generación de PWM. El tiempo total de simulación (t) es 4 segundos. En el instante t= 1,5 segundos, el par motor de la carga aumenta. En el instante t= 2,5 segundos, la velocidad de referencia cambia de 1.000 rpm a 2.000 rpm.
Modelo
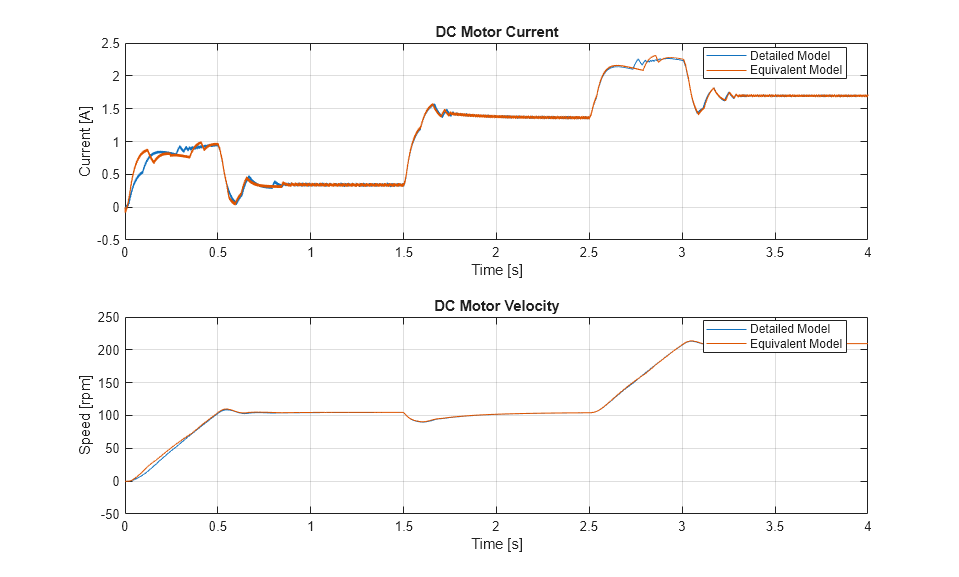
Comparar resultados de simulación de modelos detallados y equivalentes
Resultados de simulación en tiempo real
Este ejemplo se ha probado en una plataforma objetivo Speedgoat Performance en tiempo real con CPU Intel® 3.5 GHz i7 multicore. Este modelo puede ejecutarse en tiempo real con un tamaño de paso de 50 microsegundos.
Consulte también
DC Motor | Four-Quadrant Chopper | Four-Pulse Gate Multiplexer