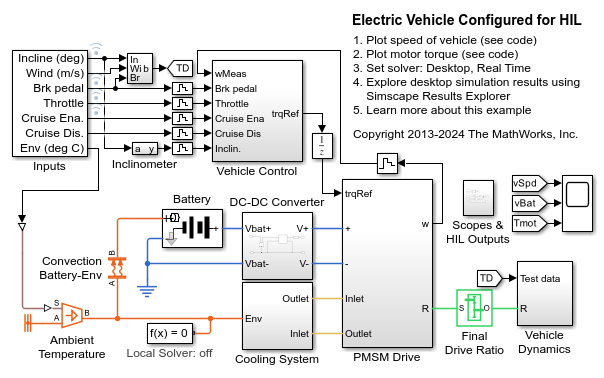
Vehículo eléctrico configurado para HIL
Este ejemplo muestra cómo crear un vehículo eléctrico. Puede utilizar el modelo para un despliegue de hardware-in-the-loop (HIL). El modelado basado en energía evita la conmutación de alta frecuencia y los solvers implementan simulación de paso fijo.
La ejecución de pruebas muestra que el vehículo acelera a una velocidad constante subiendo una pendiente, seguido de un periodo de descenso durante el que la potencia eléctrica vuelve a la batería.
Modelo
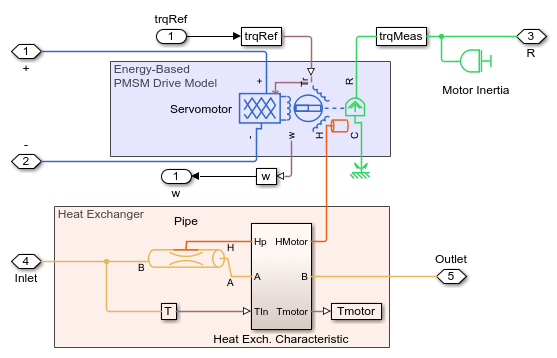
Subsistema PMSM Drive
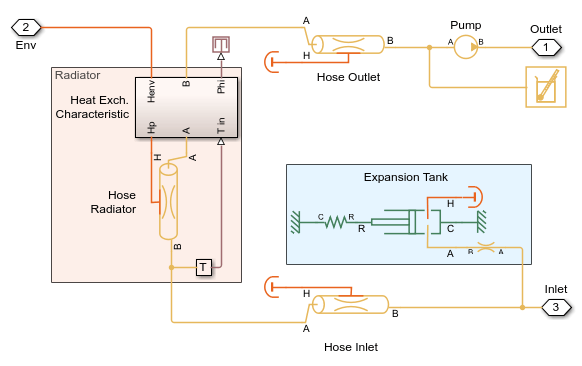
Subsistema Cooling System
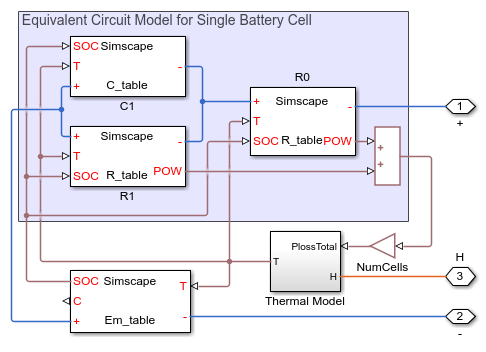
Subsistema Electric and Thermal Model
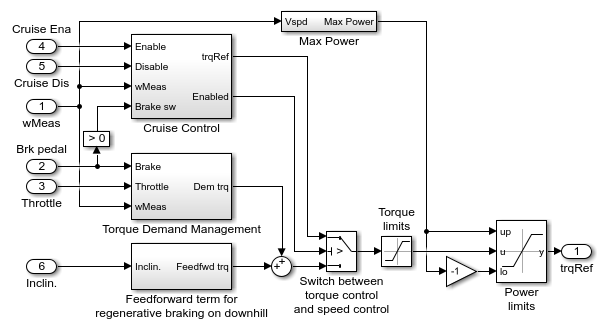
Subsistema Vehicle Control
Resultados de simulación a partir del registro de Simscape en el escritorio
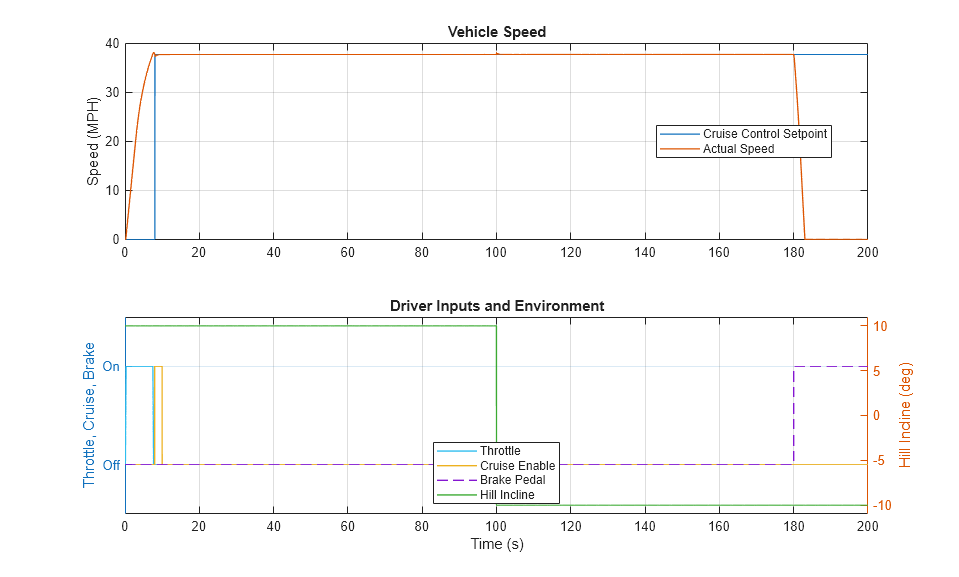
La siguiente gráfica muestra el comportamiento de un vehículo eléctrico sujeto a indicaciones del conductor y condiciones ambientales. El vehículo acelera hasta que el conductor activa el control de crucero. El vehículo mantiene la velocidad incluso si la calidad de la carretera cambia. Cuando el conductor activa el freno, el vehículo desacelera hasta alcanzar una velocidad de cero.
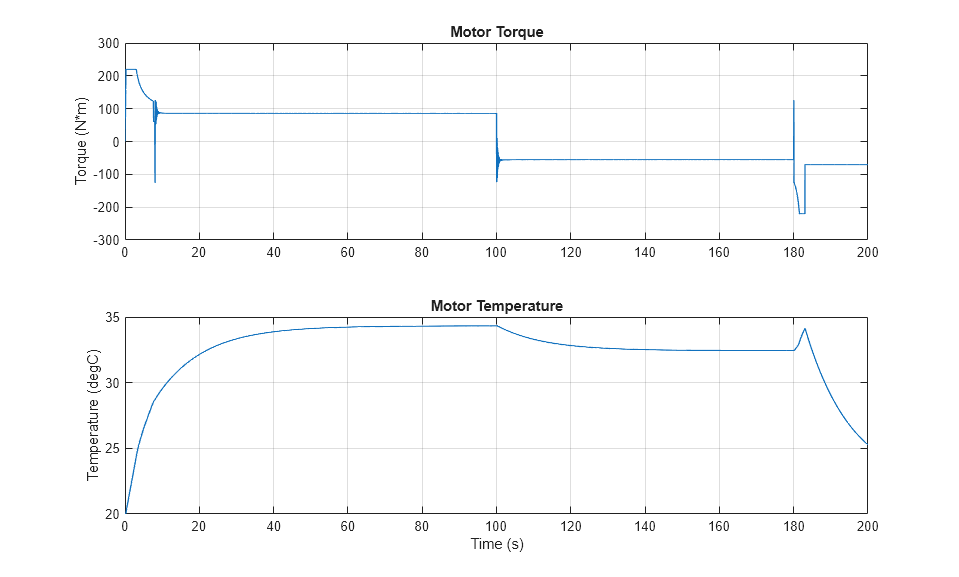
Las siguientes gráficas muestran el par generado por el motor PMSM del vehículo eléctrico y su temperatura. Durante la primera mitad de la simulación, el motor acelera el vehículo a la velocidad indicada y continúa aplicando el par motor para impulsar el vehículo cuesta arriba. Durante la segunda mitad de la simulación, el motor actúa como un generador, tal como se muestra con el cambio de signo del par motor.
Resultados de simulación en tiempo real
Este ejemplo se ha probado en una plataforma objetivo Speedgoat Performance en tiempo real con CPU Intel® 3.5 GHz i7 multicore. Este modelo puede ejecutarse en tiempo real con un tamaño de paso de 400 microsegundos.
Consulte también
Motor & Drive (System Level) | DC-DC Converter