Measure Timing
Measure timing of pixel control bus input
Libraries:
Vision HDL Toolbox /
Utilities
Description
The Measure Timing block measures the timing parameters of a video stream. This block is for use in Simulink® simulation only and does not support HDL code generation.
The Vision HDL Toolbox™ streaming pixel protocol implements the timing of a video system, including inactive intervals between frames. These inactive intervals are called blanking intervals. Many Vision HDL Toolbox blocks require minimum blanking intervals. For more information, see Configure Blanking Intervals. You can use the timing parameter measurements from this block to check that your video stream meets these requirements. If you manipulate the control signals of your video stream, you can use this block to verify the resulting signals.
To determine the parameters of each frame, the block measures the time steps between the control signals on the bus.
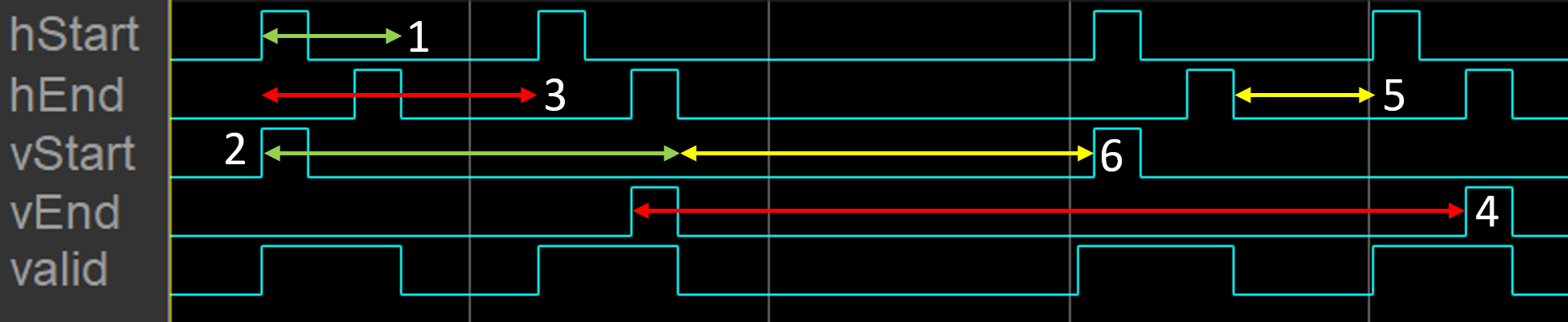
1— Active pixels per line2— Active lines per frame (counthStartpulses)3— Total pixels per line4— Total lines per frame (cycles divided by total pixels per line)5— Horizontal blanking6— Vertical blanking (cycles, minus horizontal blanking, divided by total pixels per line)
For details on the pixel control bus and the dimensions of a video frame, see Streaming Pixel Interface.
Note
Measurements from the first simulated frame are incorrect because some parameters require measurements between frames. Simulate at least two frames before using the results.
Ports
Input
Output
Extended Capabilities
Version History
Introduced in R2016b