Robust Control Toolbox
Diseño de controladores robustos para plantas inciertas
¿Tiene preguntas? Comuníquese con ventas.
¿Tiene preguntas? Comuníquese con ventas.
Robust Control Toolbox proporciona funciones y bloques para analizar y ajustar el rendimiento y robustez de sistemas de control en presencia de incertidumbre de planta. Puede crear modelos inciertos combinando dinámicas nominales con elementos inciertos, como parámetros inciertos o dinámicas no modeladas. Es posible analizar el impacto de la incertidumbre del modelo de planta en el rendimiento del sistema de control e identificar las peores combinaciones de elementos inciertos. Las técnicas de H infinito y síntesis de mu permiten diseñar controladores que maximizan la estabilidad y el rendimiento robustos.
Esta toolbox incorpora ajuste robusto a las prestaciones de ajuste automático de Control System Toolbox. Los controladores ajustados se pueden descentralizar con diversos bloques ajustables que abarcan varios bucles de realimentación. Puede optimizar el rendimiento de la planta nominal al tiempo que se garantiza un rendimiento mínimo inferior en todo el rango de incertidumbre.

Puede crear modelos inciertos mediante la combinación de dinámicas nominales con elementos inciertos, como parámetros inciertos o dinámicas omitidas. Represente sistemas inciertos que utilizan modelos inciertos de respuesta en frecuencia y de espacio de estados.

Cuantifique cómo afecta la incertidumbre a la estabilidad y rendimiento de un sistema de control utilizando márgenes de ganancia y fase basados en disco de ciclos de retroalimentación SISO y MIMO.

Calcule los límites superior e inferior de rendimiento en el peor caso sin muestreo aleatorio. También puede calcular márgenes de robustez que indiquen cuánta variación en parámetros inciertos puede tolerar el sistema para mantener la estabilidad o rendimiento deseados.

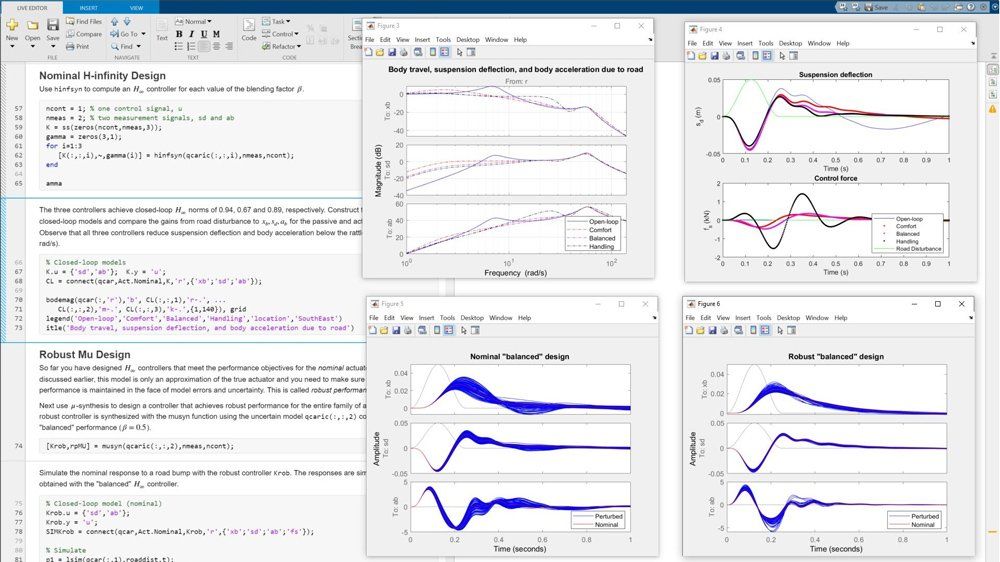
Genere muestras aleatorias de sistemas inciertos dentro del rango de incertidumbre especificado. Vea cómo afecta la incertidumbre a las respuestas en el tiempo y en la frecuencia del sistema.
Sintetice controladores MIMO robustos utilizando algoritmos tales como H-infinito y mu-síntesis. Optimice el rendimiento de H infinito de las estructuras de control fijas. Automatice tareas de conformación de lazo empleando los enfoques de sensibilidad mixta o Glover-McFarlane.
Documentación (H-infinito, mu-síntesis) | Ejemplos (H-infinito, mu-síntesis)

Ajuste sistemas de control automáticamente para que cumplan con requisitos de diseño de alto nivel tales como seguimiento de referencia, rechazo de perturbaciones y márgenes de estabilidad, entre otros, con la app Control System Tuner o el comando systune. Garantice un rendimiento robusto al cumplir con estos requisitos incluso en presencia de incertidumbre o variación de parámetros de planta.

Represente elementos inciertos en un modelo de Simulink y linealice el modelo para analizar los efectos de la incertidumbre en el conjunto del sistema. Ajuste automáticamente el controlador del sistema incierto modelado en Simulink.

Especifique y resuelva problemas generales de desigualdad matricial lineal (LMI). Robust Control Toolbox proporciona solvers de LMI para viabilidad, reducción de costes y reducción generalizada de valor propio.

Utilice ejemplos de referencia para aplicaciones de electrónica de potencia, automoción y aeroespaciales para sintetizar y ajustar controladores de estructura fija modelados en MATLAB y Simulink para modelos de planta con incertidumbre.
30 días de exploración a su alcance.
Díganos cómo podemos ayudar.
Comuníquese con el equipo técnico experto en Robust Control Toolbox.
También puede seleccionar uno de estos países/idiomas:
América
Europa
Asia-Pacífico