Uso de FEEDBACK para cerrar lazos de retroalimentación
Este ejemplo muestra por qué se recomienda usar siempre FEEDBACK para cerrar lazos de retroalimentación.
Dos maneras de cerrar lazos de retroalimentación
Considere el siguiente lazo de retroalimentación:
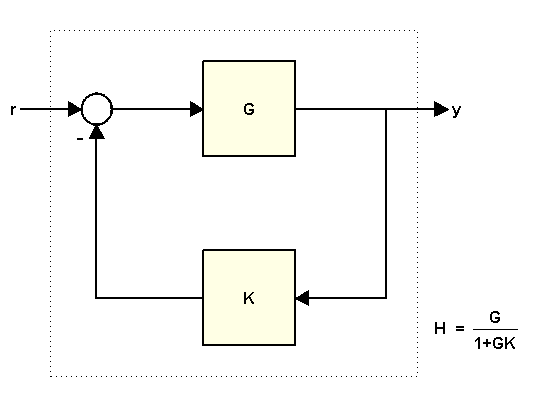
donde
K = 2; G = tf([1 2],[1 .5 3])
G =
s + 2
---------------
s^2 + 0.5 s + 3
Continuous-time transfer function.
Model Properties
Puede calcular la función de transferencia de lazo cerrado H de r a y de dos maneras:
Con el comando
feedbackCon la fórmula
Para calcular H con feedback, introduzca lo siguiente:
H = feedback(G,K)
H =
s + 2
---------------
s^2 + 2.5 s + 7
Continuous-time transfer function.
Model Properties
Para calcular H con la fórmula, introduzca lo siguiente:
H2 = G/(1+G*K)
H2 =
s^3 + 2.5 s^2 + 4 s + 6
-----------------------------------
s^4 + 3 s^3 + 11.25 s^2 + 11 s + 21
Continuous-time transfer function.
Model Properties
Por qué es mejor utilizar FEEDBACK
Un gran problema al calcular H con la fórmula es que agranda el orden de la función de transferencia de lazo cerrado. En el ejemplo anterior, H2 tiene el doble de orden que H. Esto se debe a que la expresión G/(1+G*K) se evalúa como coeficiente de las dos funciones de transferencia G y 1+G*K. Si
G/(1+G*K) se evalúa de la siguiente manera:
En consecuencia, los polos de G se añaden tanto al numerador como al denominador de H. Puede confirmarlo observando la representación ZPK:
zpk(H2)
ans =
(s+2) (s^2 + 0.5s + 3)
---------------------------------
(s^2 + 0.5s + 3) (s^2 + 2.5s + 7)
Continuous-time zero/pole/gain model.
Model Properties
Este exceso de polos y ceros puede afectar negativamente a la precisión de sus resultados cuando se trate de funciones de transferencia de orden superior, como se muestra en el siguiente ejemplo: Este ejemplo incluye una función de transferencia de orden 17 G. Como ha hecho anteriormente, use ambos métodos para calcular la función de transferencia de lazo cerrado para K=1:
load numdemo G H1 = feedback(G,1); % good H2 = G/(1+G); % bad
Para tener un punto de referencia, calcule también un modelo FRD que contenga la respuesta en frecuencia de G y aplique feedback a los datos de la respuesta en frecuencia directamente:
w = logspace(2,5.1,100); H0 = feedback(frd(G,w),1);
A continuación, compare las magnitudes de las respuestas en lazo cerrado:
sigmaplot(H0,'b',H1,'g--',H2,'r'); legend('Reference H0','H1=feedback(G,1)','H2=G/(1+G)','location','southwest'); ylim([-60 0])
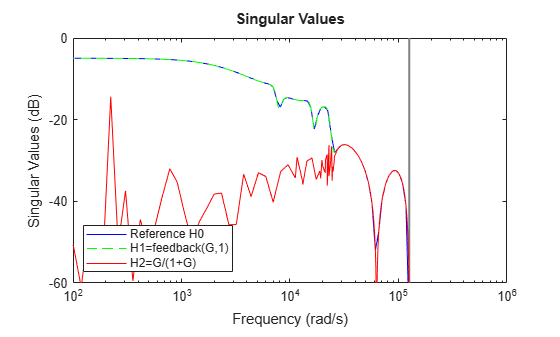
La respuesta en frecuencia de H2 no es precisa para las frecuencias inferiores a 2e4 rad/s. Esta imprecisión se debe a la dinámica adicional (que se cancela) introducida cerca de z=1. De manera específica, H2 tiene, aproximadamente, el doble de polos y ceros cerca de z=1 que H1. Por lo tanto, H2(z) tiene una precisión muy inferior cerca de z=1, lo que distorsiona la respuesta en frecuencias bajas. Consulte el ejemplo Using the Right Model Representation para más información.