Reinforcement learning
Reinforcement learning es un enfoque de aprendizaje computacional guiado por objetivos donde un agente aprende a realizar una tarea interactuando con un entorno dinámico desconocido. Durante el entrenamiento, el algoritmo de aprendizaje actualiza los parámetros de la política del agente. El objetivo del algoritmo de aprendizaje es encontrar una política óptima que maximice la recompensa cumulativa descontada a largo plazo esperada que se recibe durante la tarea.
Este enfoque de aprendizaje permite al agente tomar una serie de decisiones para maximizar la recompensa cumulativa de una tarea sin intervención humana y sin estar programado explícitamente para lograr un objetivo. Puede crear y entrenar agentes de reinforcement learning utilizando el software Reinforcement Learning Toolbox™.
Para obtener más información, consulte What Is Reinforcement Learning? (Reinforcement Learning Toolbox).
Temas
- What Is Reinforcement Learning? (Reinforcement Learning Toolbox)
Reinforcement learning is a goal-directed computational approach where a computer learns to perform a task by interacting with an uncertain dynamic environment.
- Reinforcement Learning Workflow (Reinforcement Learning Toolbox)
Typical workflow you use to apply reinforcement learning to a problem.
- Reinforcement Learning Environments (Reinforcement Learning Toolbox)
Model environment dynamics using a MATLAB® object that generates rewards and observations in response to agents actions.
- Reinforcement Learning for Control Systems Applications (Reinforcement Learning Toolbox)
You can train a reinforcement learning agent to control a plant.
- Train Reinforcement Learning Agent in MDP Environment (Reinforcement Learning Toolbox)
Train a reinforcement learning agent in a generic Markov decision process environment.
- Train Reinforcement Learning Agent in Basic Grid World (Reinforcement Learning Toolbox)
Train Q-learning and SARSA agents to solve a grid world in MATLAB.
- Design and Train Agent Using Reinforcement Learning Designer (Reinforcement Learning Toolbox)
Design and train a DQN agent for a cart-pole system using the Reinforcement Learning Designer app.
- Create DQN Agent Using Deep Network Designer and Train Using Image Observations (Reinforcement Learning Toolbox)
Create a reinforcement learning agent using the Deep Network Designer app from the Deep Learning Toolbox™.
- Train DDPG Agent with Custom Networks Using Image Observation (Reinforcement Learning Toolbox)
Train a DDPG agent with custom networks using an image-based observation signal.
- Control Water Level in a Tank Using a DDPG Agent (Reinforcement Learning Toolbox)
Train a controller using reinforcement learning with a plant modeled in Simulink® as the training environment.
Ejemplos destacados
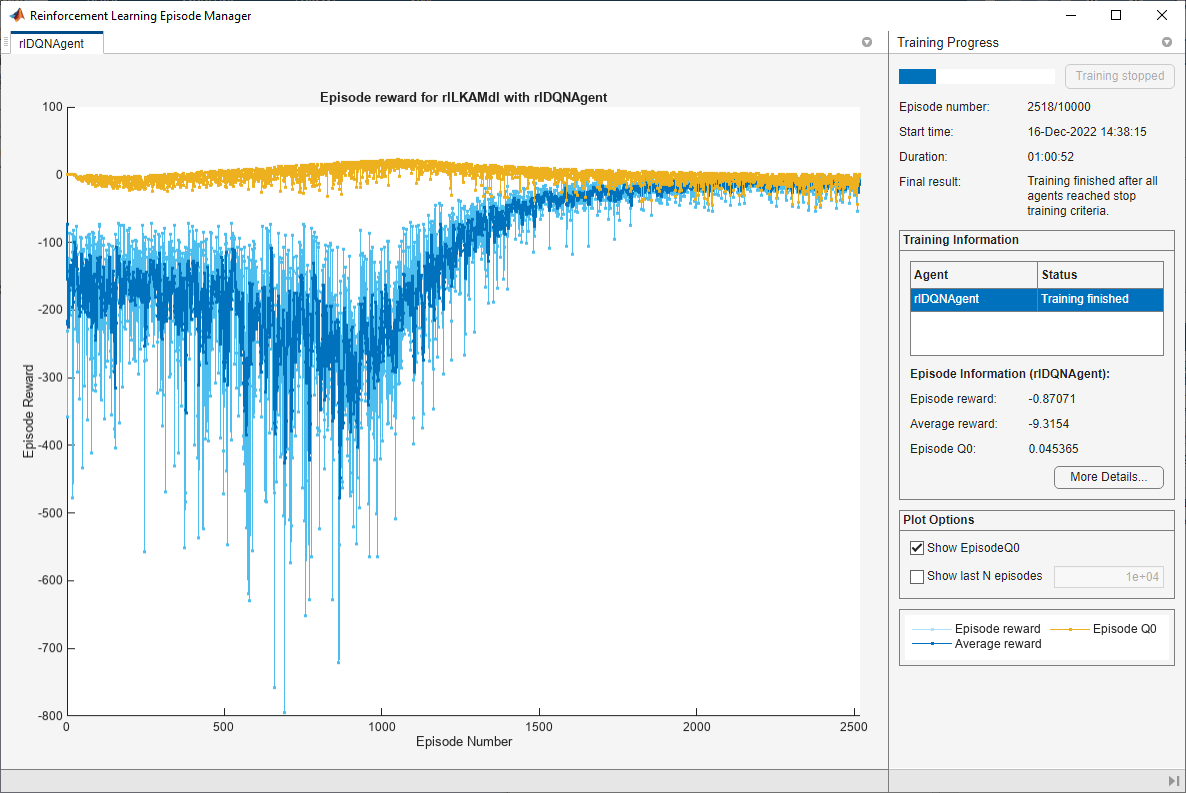
Train DQN Agent for Lane Keeping Assist Using Parallel Computing
Train a DQN agent for an automated driving application using parallel computing.

Deep Reinforcement Learning for Optimal Trade Execution
Use the Reinforcement Learning Toolbox™ and Deep Learning Toolbox™ to design agents for optimal trade execution.
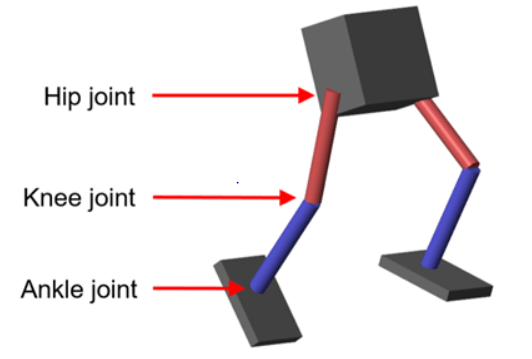
Train Biped Robot to Walk Using Reinforcement Learning Agents
Compare DDPG and TD3 agent for the control a biped walking robot modeled in Simscape™ Multibody™.
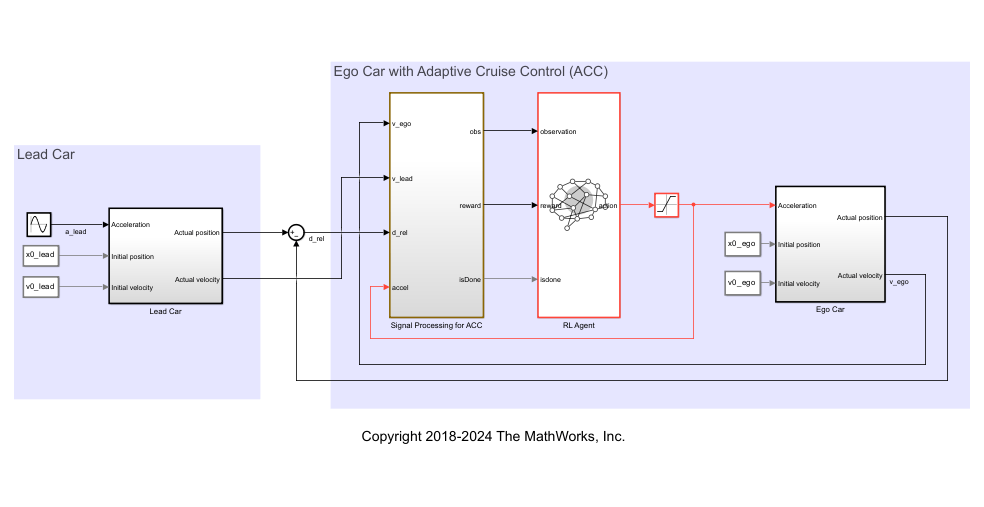
Train DDPG Agent for Adaptive Cruise Control
Train a DDPG agent for an adaptive cruise control application.

Train Hybrid SAC Agent for Path-Following Control
Train a hybrid SAC agent for lane following control.

Automatic Parking Valet with Unreal Engine Simulation
Use a TD3 agent with an MPC controller to perform a parking maneuver.

Train Humanoid Walker
Model a humanoid robot using Simscape Multibody™ and train it using either a genetic algorithm (which requires a Global Optimization Toolbox license) or reinforcement learning (which requires Deep Learning Toolbox™ and Reinforcement Learning Toolbox™ licenses).