Lateral Controller Stanley
Control steering angle of vehicle for path following by using Stanley method
Libraries:
Automated Driving Toolbox /
Vehicle Control
Description
The Lateral Controller Stanley block computes the steering angle command, in degrees, that adjusts the current pose of a vehicle to match a reference pose, given the vehicle's current velocity and direction. The controller computes this command using the Stanley method [1], whose control law is based on both a kinematic and dynamic bicycle model. To change between models, use the Vehicle model parameter.
The kinematic bicycle model is suitable for path following in low-speed environments such as parking lots, where inertial effects are minimal.
The dynamic bicycle model is suitable for path following in high-speed environments such as highways, where inertial effects are more pronounced. This vehicle model provides additional parameters that describe the dynamics of the vehicle.
Examples

Lateral Control Tutorial
Control the steering angle of a vehicle following a planned path and perform lane changing.

Automated Parking Valet in Simulink
Construct an automated parking valet system in Simulink® with Automated Driving Toolbox™.
Ports
Input
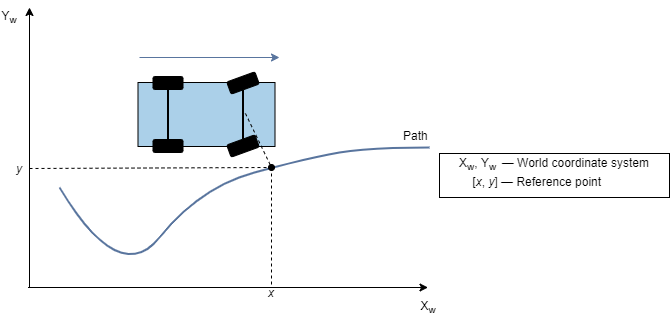
Reference pose, specified as an [x, y, Θ] vector. x and y are in meters, and Θ is in degrees.
x and y specify the reference point to steer the vehicle toward. Θ specifies the orientation angle of the path at this reference point and is positive in the counterclockwise direction.
For a vehicle in forward motion, the reference point is the point on the path that is closest to the center of the vehicle's front axle.
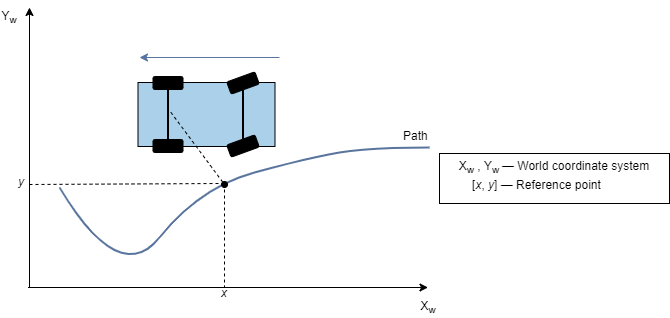
For a vehicle in reverse motion, the reference point is the point on the path that is closest to the center of the vehicle's rear axle.
Data Types: single | double
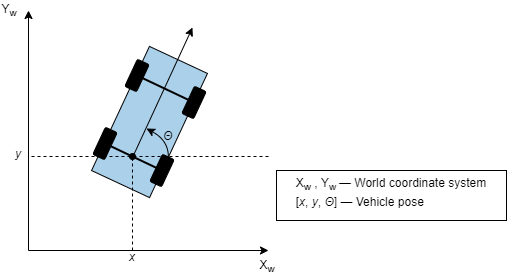
Current pose of the vehicle, specified as an [x, y, Θ] vector. x and y are in meters, and Θ is in degrees.
x and y specify the location of the vehicle, which is defined as the center of the vehicle's rear axle.
Θ specifies the orientation angle of the vehicle at location (x,y) and is positive in the counterclockwise direction.
For more details on vehicle pose, see Coordinate Systems in Automated Driving Toolbox.
Data Types: single | double
Current longitudinal velocity of the vehicle, specified as a real scalar. Units are in meters per second.
If the vehicle is in forward motion, then this value must be greater than 0.
If the vehicle is in reverse motion, then this value must be less than 0.
A value of 0 represents a vehicle that is not in motion.
Data Types: single | double
Driving direction of the vehicle, specified as 1 for forward
motion or -1 for reverse motion. The driving direction determines
the position error and angle error used to compute the steering angle command. For
more details, see Algorithms.
Curvature of the path at the reference point, in radians per meter, specified as a real scalar.
For a vehicle in forward motion, the reference point is the point on the path that is closest to the center of the vehicle's front axle.
For a vehicle in reverse motion, the reference point is the point on the path that is closest to the center of the vehicle's rear axle.
You can obtain the curvature of a path from the Curvatures output port of a Path Smoother Spline block. You can also obtain curvatures of lane boundaries from the output lane boundary structures of a Scenario Reader block.
Dependencies
To enable this port, set Vehicle model to
Dynamic bicycle model.
Current yaw rate of the vehicle, in degrees per second, specified as a real scalar. The current yaw rate is the rate of change in the angular velocity of the vehicle.
Dependencies
To enable this port, set Vehicle model to
Dynamic bicycle model.
Current steering angle of the vehicle, in degrees, specified as a real scalar. This value is positive in the counterclockwise direction.
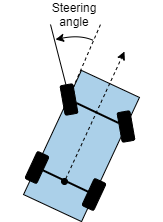
For more details, see Coordinate Systems in Automated Driving Toolbox.
Dependencies
To enable this port, set Vehicle model to
Dynamic bicycle model.
Output
Steering angle command, in degrees, returned as a real scalar. This value is positive in the counterclockwise direction.
For more details, see Coordinate Systems in Automated Driving Toolbox.
Parameters
Tips
You can switch between bicycle models as the vehicle environment changes. Add two Lateral Controller Stanley blocks to a variant subsystem and specify a different bicycle model for each block. For an example, see Lateral Control Tutorial.
Algorithms
To compute the steering angle command, the controller minimizes the position error and the angle error of the current pose with respect to the reference pose. The driving direction of the vehicle determines these error values.
When the vehicle is in forward motion (Direction parameter is
1):
The position error is the lateral distance from the center of the front axle to the reference point on the path.
The angle error is the angle of the front wheel with respect to reference path.
When the vehicle is in reverse motion (Direction parameter is
-1):
The position error is the lateral distance from the center of the rear axle to the reference point on the path.
The angle error is the angle of the rear wheel with respect to reference path.
For details on how the controller minimizes these errors for kinematic and dynamic bicycle models, see [1].
References
[1] Hoffmann, Gabriel M., Claire J. Tomlin, Michael Montemerlo, and Sebastian Thrun. "Autonomous Automobile Trajectory Tracking for Off-Road Driving: Controller Design, Experimental Validation and Racing." American Control Conference. 2007, pp. 2296–2301. doi:10.1109/ACC.2007.4282788
Extended Capabilities
Version History
Introduced in R2018b