MCAN Transmit
Libraries:
Embedded Coder Support Package for Infineon AURIX TC4x
Microcontrollers /
AURIX TC4x
Description
Add-On Required: This feature requires the Embedded Coder Support Package for Infineon AURIX TC4x Microcontrollers add-on.
The MCAN Receive block is a Modular CAN (MCAN) that writes data to the controller area network (CAN) bus.
The block accepts a 1-D array of type uint8 when you set the data
format to Raw data. If you set the data format to
CAN Message, the block accepts a Simulink® bus signal from the CAN Pack or CAN FD Pack blocks, depending on
the frame format.
Examples

Polling-Based CAN Communication Using MCAN Blocks of Infineon AURIX TC4x
Use the MCAN Transmit and MCAN Receive blocks from Embedded Coder® Support Package for Infineon® AURIX™ TC4x Microcontrollers to handle polling-based communication between different CAN modules of Infineon® AURIX™ TC4x Microcontrollers.
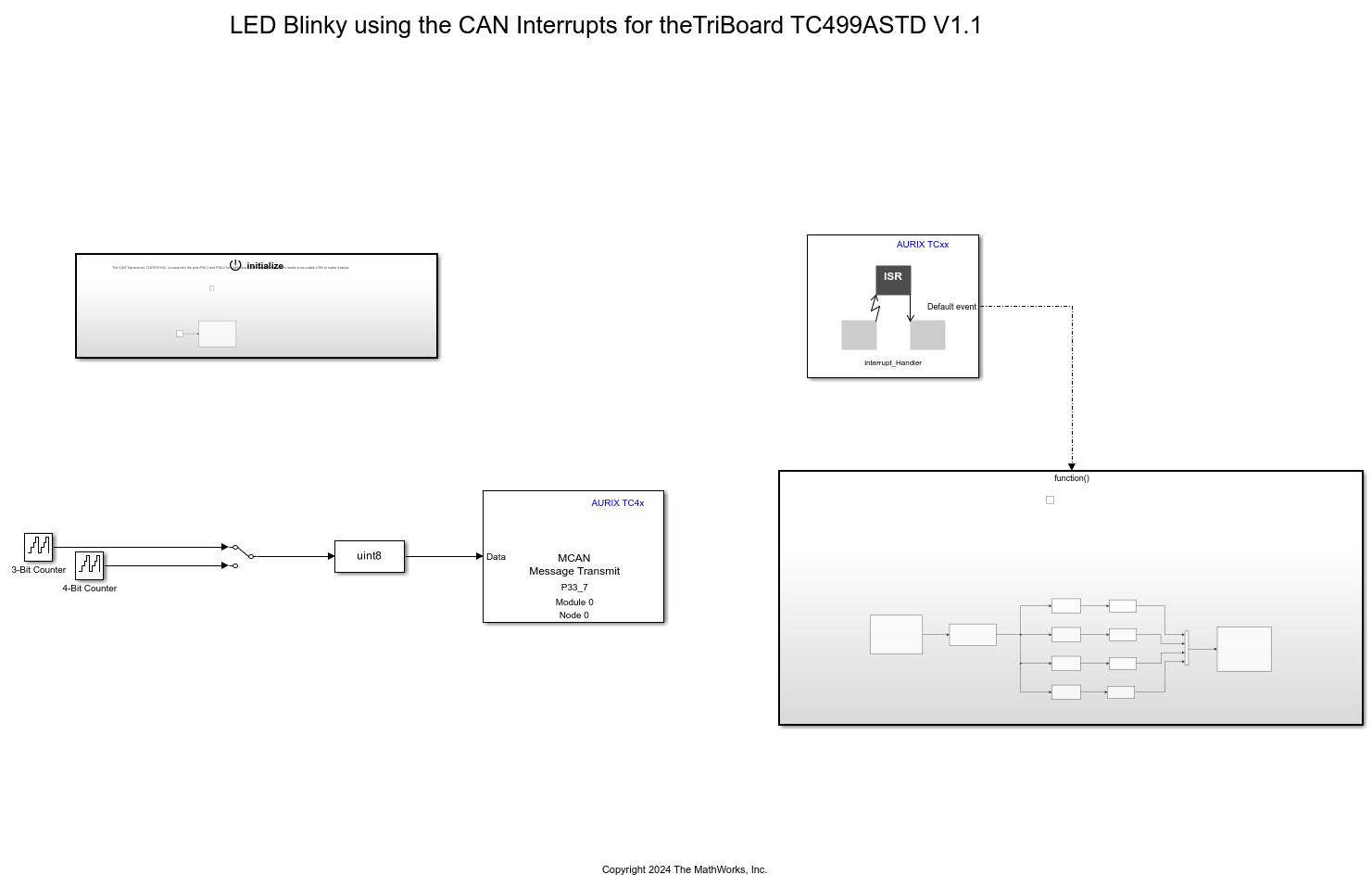
Interrupt-Based CAN Communication Using MCAN Blocks of Infineon AURIX TC4x
Use the MCAN Transmit and Receive blocks from Embedded Coder® Support Package for Infineon® AURIX™ TC4x Microcontrollers to handle interrupt-based communication between different CAN modules of Infineon® AURIX™ TC4x Microcontrollers.
Ports
Input
Specify the messages in the raw data format at this port.
Dependencies
To enable this port, set the Data format parameter
to Raw data and disable the Remote
transmit parameter.
Data Types: uint8
Specify the remote transmission request at this port as:
1 —To activate the remote transmission request0 —To deactivate the remote transmission request
Dependencies
To enable this port, set the Data format parameter
to Raw data, the Frame format
parameter to Classic CAN, and enable the
Remote transmit parameter.
Data Types: Boolean
Specify the CAN message identifier at this port as one of these values:
0-0x7ff —For a standard (11-bit) identifier0-0x1fffffff —For an extended (29-bit) identifier
Dependencies
To enable this parameter, set the Data format
parameter to Raw data and select the Enable
input port for identifier parameter.
Data Types: uint32
Specify the CAN message identifier type at this port as one of these values:
0 —If the identifier is an 11-bit standard identifier1or any value other than0 —If the identifier is an 29-bit standard identifier
Dependencies
To enable this parameter, set the Data format
parameter to Raw data and select the Enable
input port for identifier type parameter.
Data Types: uint8
Specify the length of the transmitted CAN message in bytes at this port.
Note
The Length value determines the size of the data to be transmitted over the CAN bus. If the value at the Length port is greater than the size of the value at the Data port, then Simulink prioritizes the Data value over the Length value.
Dependencies
To enable this parameter, set the Data format
parameter to Raw data and select the Enable
input port for data length parameter.
Data Types: uint8
Specify the messages in the CAN message format.
You can create your messages or you can upload a CAN database file from the CAN Pack or CAN FD Pack blocks depending on the value in the Frame format parameter.
Note
To create a CAN message using the CAN Pack block, enable the Output as bus parameter in the CAN Pack block.
Dependencies
To enable this port, set the Data format parameter
to CAN message.
Data Types: CAN message
Specify the number of buffers for CAN transmission.
Dependencies
To enable this port, set the Data format
parameter to CAN message, Mode
parameter to Buffer, and select the
Enable input port for buffer number
parameter.
Data Types: uint8
Output
Specify the data transmission status at this port as one of these values:
0— No error in CAN data transmission1— Error in CAN data transmission due to timeout2— Error in CAN data transmission due to invalid buffer configuration
Dependencies
To enable this port, select the Enable status port parameter.
Data Types: uint8
Output port to display the level of the FIFO register.
Dependencies
To enable this parameter, set the Mode parameter to
FIFO or Queue and select the Output
FIFO transmit free level parameter.
Parameters
Set the data type of the transmitted message as one of these values:
Raw data— Transmit the message as a 1-by-Nuint8array.CAN message— Transmit message in CAN message format. Depending on the value of the Frame format parameter, use CAN Pack or CAN FD Pack blocks along with the MCAN Transmit block to pack the CAN message.
Note
To create a CAN message using the CAN Pack block, enable the Output as bus parameter in the CAN Pack block.
Select the frame format of the transmitted message.
Select this parameter to transmit a remote frame in the CAN message.
Dependencies
To enable this parameter, set the Data format parameter
to Raw data and set the Frame
format parameter to Classic
CAN.
CAN FD
Select this parameter to enable switching between the nominal bit rate and the data bit rate.
Dependencies
To enable this parameter, set the Data
Format parameter to Raw data and
Frame format to CAN-FD.
Identifier type
Select this parameter to enable the input port to specify the identifier type.
Dependencies
To enable this parameter, set the Data format parameter
to Raw data.
Specify the type of message identifier.
Dependencies
To enable this parameter, set the Data
Format parameter to Raw data and disable the
Enable input port for identifier type parameter.
Identifier
Select to enable input port for identifier.
Dependencies
To enable this parameter, set Data format parameter to
Raw data.
Specify an 11-bit identifier for the standard frame size or a 29-bit identifier
for the extended frame size. You can specify the identifier as a decimal, binary,
or hexadecimal value. For binary and hexadecimal formats, use bin2dec and hex2dec respectively to convert
the value. The block codes the identifier into a message and sends it to the CAN
bus.
Dependencies
To enable this parameter, set Data format parameter to
Raw data and disable the Enable input
port for identifier type parameter.
Data length
Select this parameter to enable the input port to specify data length.
Dependencies
To enable this parameter, set the Data format as
Raw data.
Specify the data length in bytes.
Dependencies
To enable this parameter, set the Data format as
Raw data and disable the Enable input port for
data length parameter.
Node
Specify the number of CAN nodes for data transmission.
Note
The choice of the Number of nodes parameter determines how many nodes you must configure in the Hardware Mapping tool (see MCAN Transmit Peripheral Configuration).
Select the mode of the CAN data transmission.
Buffer
Select this parameter to enable the Buffer Number input port in the block.
Dependencies
To enable this parameter, set the Mode parameter to
Buffer.
Specify the number of buffers to use for transmitting the CAN data.
Dependencies
To enable this parameter, set the Mode parameter to
Buffer and disable the Enable input
port for buffer number parameter.
Timeout
Specify the maximum waiting time (in seconds) to transmit the CAN data.
Note
To avoid precision errors, set the Timeout value as
integer multiple of 1 millisecond such as 1e-3,
12e-3, or 50e-3. If the value is not a
multiple of 0.001, the MCAN block rounds down it to the nearest valid value.
For example, it rounds down the value 12.6e-3 to
12e-3.
Select this parameter to enable the FIFO level port, which outputs the transmitted FIFO message level.
Dependencies
To enable this parameter, set the Mode parameter to
FIFO or Queue.
Select this parameter to enable the Status port, which outputs the data transmission status.
Version History
Introduced in R2024b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Seleccione un país/idioma
Seleccione un país/idioma para obtener contenido traducido, si está disponible, y ver eventos y ofertas de productos y servicios locales. Según su ubicación geográfica, recomendamos que seleccione: .
También puede seleccionar uno de estos países/idiomas:
Cómo obtener el mejor rendimiento
Seleccione China (en idioma chino o inglés) para obtener el mejor rendimiento. Los sitios web de otros países no están optimizados para ser accedidos desde su ubicación geográfica.
América
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)