MCAN Receive
Libraries:
Embedded Coder Support Package for Infineon AURIX TC4x Microcontrollers /
AURIX TC4x
Description
Add-On Required: This feature requires the Embedded Coder Support Package for Infineon AURIX TC4x Microcontrollers add-on.
The MCAN Receive block is a Modular CAN (MCAN) that reads data from the controller area network (CAN) bus.
For unpacked messages, the block outputs the received values as a 64-by-1 array for the CAN-FD frame format and as a 8-by-1 array for the Classic CAN frame format.
For packed messages, the block outputs a Simulink® bus signal. To extract data from the Simulink bus signal, use the CAN Unpack block if the frame format is Classic CAN or CAN FD Unpack blocks if the frame format is CAN-FD.
Examples

Polling-Based CAN Communication Using MCAN Blocks of Infineon AURIX TC4x
Use the MCAN Transmit and MCAN Receive blocks from Embedded Coder® Support Package for Infineon® AURIX™ TC4x Microcontrollers to handle polling-based communication between different CAN modules of Infineon® AURIX™ TC4x Microcontrollers.
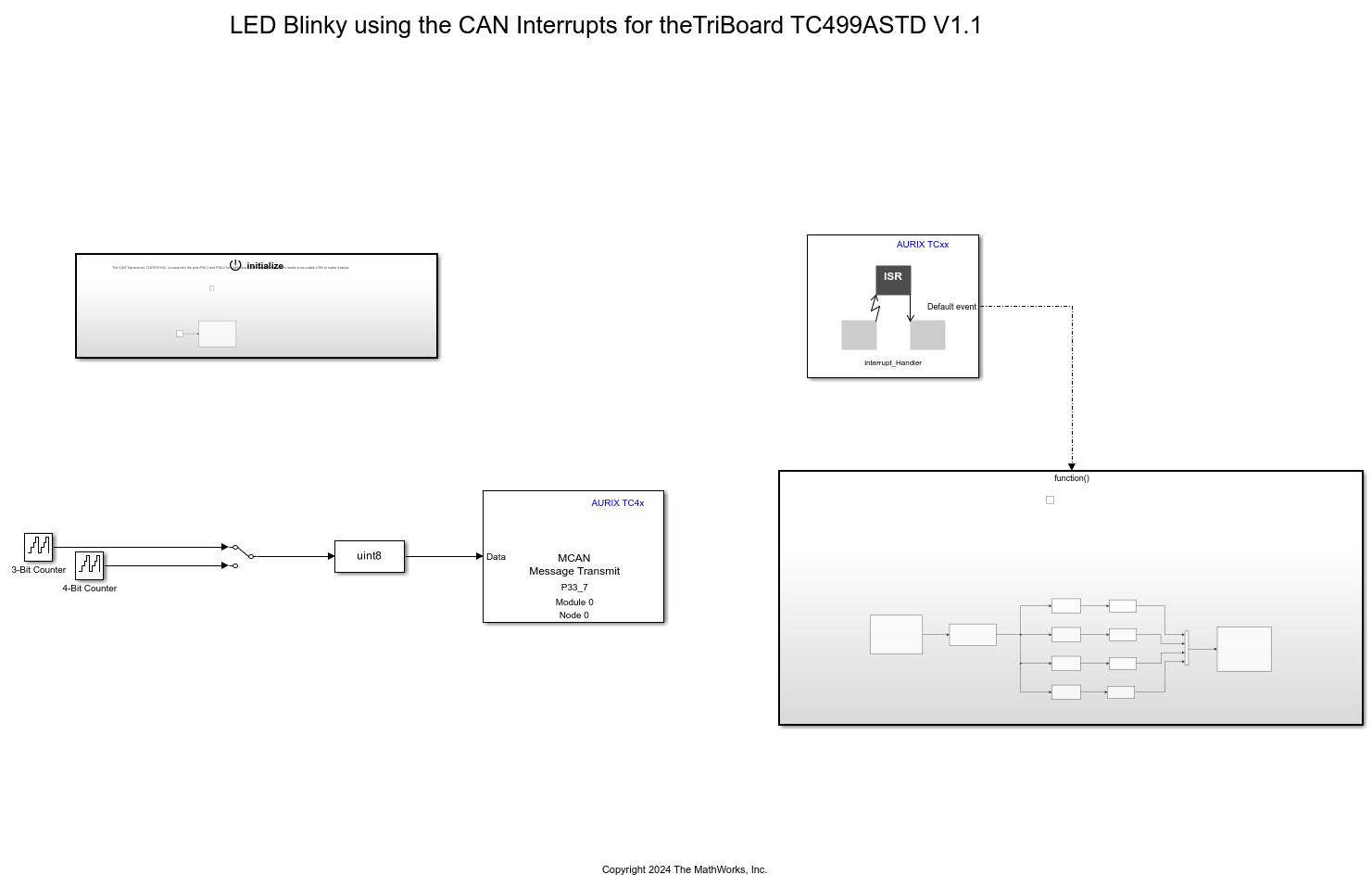
Interrupt-Based CAN Communication Using MCAN Blocks of Infineon AURIX TC4x
Use the MCAN Transmit and Receive blocks from Embedded Coder® Support Package for Infineon® AURIX™ TC4x Microcontrollers to handle interrupt-based communication between different CAN modules of Infineon® AURIX™ TC4x Microcontrollers.
Ports
Input
Output
Parameters
Version History
Introduced in R2024b