lsim
Calcular datos de simulación de respuesta en el tiempo de un sistema dinámico para entradas arbitrarias
Sintaxis
Descripción
Datos de respuesta
y = lsim(sys,u,t)y a la entrada u, muestreada en los mismos tiempos t que la entrada. En sistemas con una única salida, y es un vector de la misma longitud que t. En sistemas de varias salidas, y es un arreglo que tiene tantas filas como muestras de tiempo y tantas columnas como salidas en sys.
Método de interpolación de entradas
Captura de estado de POD
Desde R2024b
[ realiza la descomposición ortogonal propia (POD) de las capturas instantáneas de estados para un modelo en espacio de estados LTI y,tOut,x,~,xPODOut] = lsim(___,xPODIn)sys. En este caso, xPOD es un objeto incrementalPOD. Puede iniciar un nuevo análisis de POD o añadirlo a resultados de POD anteriores. Consulte incrementalPOD (Control System Toolbox) y reducespec (Control System Toolbox) para ver ejemplos y aplicaciones de reducción de modelo.
Gráficas de respuesta
lsim(___) representa la respuesta en el tiempo simulada del sys al historial de entradas (u,t) para todas las combinaciones de argumentos de entrada anteriores, excepto la captura instantánea de estado de POD. La gráfica utiliza opciones de representación predeterminadas. Para ver más opciones de personalización de gráficas, utilice lsimplot.
Para representar respuestas para múltiples sistemas dinámicos en la misma gráfica, puede especificar
syscomo lista de modelos separada por comas. Por ejemplo,lsim(sys1,sys2,sys3,u,t)representa las respuestas para tres modelos en la misma gráfica.Para especificar un color, un estilo de línea y un marcador para cada sistema de la gráfica, especifique un valor
LineSpecpara cada sistema. Por ejemplo,lsim(sys1,LineSpec1,sys2,LineSpec2,u,t)representa dos modelos y especifica su estilo de gráfica. Para obtener más información sobre cómo especificar un valorLineSpec, consultelsimplot.
Linear Simulation Tool
lsim( abre Linear Simulation Tool (Control System Toolbox) para simular sys)sys.
Ejemplos
Considere la siguiente función de transferencia.
sys = tf(3,[1 2 3])
sys =
3
-------------
s^2 + 2 s + 3
Continuous-time transfer function.
Model Properties
Para calcular la respuesta de este sistema a una señal de entrada arbitraria, proporcione lsim con un vector de los tiempos t en los que desea calcular la respuesta y un vector u que contiene los valores de señal correspondientes. Por ejemplo, represente la respuesta del sistema a una señal escalonada en rampa que comienza en 0 en la unidad de tiempo t = 0, aumenta desde 0 en t = 1 a 1 en t = 2 y, después, se mantiene estable en 1. Defina t y calcule los valores de u.
t = 0:0.04:8; % 201 points
u = max(0,min(t-1,1));Utilice lsim sin un argumento de salida para representar la respuesta del sistema a la señal.
lsim(sys,u,t)
grid on
La gráfica muestra la entrada aplicada (u,t) en color gris y la respuesta del sistema en color azul.
Utilice lsim con un argumento de salida para obtener los datos de la respuesta simulada.
y = lsim(sys,u,t); size(y)
ans = 1×2
201 1
El vector y contiene la respuesta simulada en los tiempos correspondientes en t.
Utilice gensig (Control System Toolbox) para crear señales de entrada periódicas, como ondas sinusoidales y ondas cuadradas, para utilizarlas con lsim. Simule la respuesta a una onda cuadrada del siguiente modelo en espacio de estados SISO.
A = [-3 -1.5; 5 0]; B = [1; 0]; C = [0.5 1.5]; D = 0; sys = ss(A,B,C,D);
Para este ejemplo, cree una onda cuadrada con un periodo de 10 s y una duración de 20 s.
[u,t] = gensig("square",10,20);gensig devuelve el vector t de unidades de tiempo y el vector u que contiene los valores correspondientes de la señal de entrada. (Si no especifica un tiempo de muestreo para t, gensig genera 64 muestras por periodo). Utilícelas con lsim y represente la respuesta del sistema.
lsim(sys,u,t)
grid on
La gráfica muestra la onda cuadrada aplicada en color gris y la respuesta del sistema en color azul. Llame a lsim con un argumento de salida para obtener los valores de respuesta en cada punto de t.
[y,~] = lsim(sys,u,t);
Cuando simula la respuesta de un sistema en tiempo discreto, el vector de tiempo t debe presentar el formato Ti:dT:Tf, donde dT es el tiempo de muestreo del modelo. Simule la respuesta de la siguiente función de transferencia en tiempo discreto para una entrada de escalón en rampa.
sys = tf([0.06 0.05],[1 -1.56 0.67],0.05);
Esta función de transferencia tiene un tiempo de muestreo de 0,05 s. Utilice el mismo tiempo de muestreo para generar el vector de tiempo t y una señal escalonada en rampa u.
t = 0:0.05:4; u = max(0,min(t-1,1));
Represente la respuesta del sistema.
lsim(sys,u,t)
Para simular la respuesta de un sistema en tiempo discreto para una señal de entrada periódica, utilice el mismo tiempo de muestreo con gensig para generar la entrada. Por ejemplo, simule la respuesta del sistema para una onda sinusoidal con un periodo de 1 s y una duración de 4 s.
[u,t] = gensig("sine",1,4,0.05);Represente la respuesta del sistema.
lsim(sys,u,t)


lsim permite representar las respuestas simuladas de múltiples sistemas dinámicos en el mismo eje. Por ejemplo, compare la respuesta en lazo cerrado de un sistema con un controlador PI y un controlador PID. Cree una función de transferencia del sistema y ajuste los controladores.
H = tf(4,[1 10 25]); C1 = pidtune(H,'PI'); C2 = pidtune(H,'PID');
Forme los sistemas de lazo cerrado.
sys1 = feedback(H*C1,1); sys2 = feedback(H*C2,1);
Represente las respuestas de ambos sistemas para una onda cuadrada con un periodo de 4 s.
[u,t] = gensig("square",4,12); lsim(sys1,sys2,u,t) grid on legend("PI","PID")

De forma predeterminada, lsim elige colores diferentes para cada sistema que se representa. Puede especificar los colores y los estilos de línea utilizando el argumento de entrada LineSpec.
lsim(sys1,"r--",sys2,"b",u,t) grid on legend("PI","PID")

El primer argumento LineSpec "r--" especifica una línea discontinua roja para la respuesta con el controlador PI. El segundo argumento LineSpec "b" especifica una línea continua azul para la respuesta con el controlador PID. La leyenda muestra los colores y los estilos de línea especificados. Para ver más opciones de personalización de gráficas, utilice lsimplot.
En un sistema MIMO, en cada unidad de tiempo t, la entrada u(t) es un vector cuya longitud es el número de entradas. Para utilizar lsim, especifique u como una matriz con dimensiones Nt por Nu, donde Nu es el número de entradas del sistema y Nt es la longitud de t. Dicho de otra forma, cada columna de u es la señal de entrada aplicada a la entrada del sistema correspondiente. Por ejemplo, para simular un sistema con cuatro entradas para 201 unidades de tiempo, proporcione u como una matriz de cuatro columnas y 201 filas, donde cada fila u(i,:) es el vector de los valores de entrada en la i-ésima unidad de tiempo; cada columna u(:,j) es la señal aplicada a la entrada j-ésima.
Del mismo modo, la salida y(t) calculada por lsim es una matriz cuyas columnas representan la señal en cada salida del sistema. Cuando utiliza lsim para representar la respuesta simulada, lsim proporciona ejes separados para cada salida, representando la respuesta del sistema en cada canal de salida para la entrada u(t) aplicada en todas las entradas.
Considere el modelo en espacio de estados con dos entradas y tres salidas, con las siguientes matrices de espacio de estados.
A = [-1.5 -0.2 1.0;
-0.2 -1.7 0.6;
1.0 0.6 -1.4];
B = [ 1.5 0.6;
-1.8 1.0;
0 0 ];
C = [ 0 -0.5 -0.1;
0.35 -0.1 -0.15
0.65 0 0.6];
D = [ 0.5 0;
0.05 0.75
0 0];
sys = ss(A,B,C,D);Represente la respuesta de sys para una onda cuadrada con un periodo de 4 s, aplicada a la primera entrada sys y un pulso aplicado a la segunda entrada cada 3 s. Para ello, cree vectores columna que representen la onda cuadrada y la señal pulsada con gensig. A continuación, apile las columnas en una matriz de entrada. Para asegurarse de que las dos señales cuentan con el mismo número de muestras, especifique el mismo tiempo final y el mismo tiempo de muestreo.
Tf = 10; Ts = 0.1; [uSq,t] = gensig("square",4,Tf,Ts); [uP,~] = gensig("pulse",3,Tf,Ts); u = [uSq uP]; lsim(sys,u,t)

Cada eje muestra la respuesta de una de las tres salidas del sistema para las señales u aplicadas en todas las entradas. Cada gráfica también muestra todas las señales de entrada en color gris.
De forma predeterminada, lsim simula el modelo, suponiendo que todos los estados son cero al inicio de la simulación. Cuando simule la respuesta de un modelo en espacio de estados, utilice el argumento de entrada opcional x0 para especificar valores de estado inicial distintos de cero. Considere el siguiente modelo en espacio de estados SISO de dos estados.
A = [-1.5 -3;
3 -1];
B = [1.3; 0];
C = [1.15 2.3];
D = 0;
sys = ss(A,B,C,D);Supongamos que desea permitir que el sistema evolucione desde una serie de estados iniciales conocida sin entradas durante 2 s y luego aplicar un cambio de escalón unitario. Especifique el vector x0 de los valores del estado inicial y cree el vector de entrada.
x0 = [-0.2 0.3];
t = 0:0.05:8;
u = zeros(length(t),1);
u(t>=2) = 1;
lsim(sys,u,t,x0)
grid on
La primera mitad de la gráfica muestra la evolución libre del sistema desde los valores del estado inicial [-0.2 0.3]. En t = 2 hay un cambio de escalón para la entrada y la gráfica muestra la respuesta del sistema a esta nueva señal a partir de los valores del estado en ese momento.
Cuando utiliza lsim con argumentos de salida, devuelve los datos de la respuesta simulada en un arreglo. En un sistema SISO, los datos de respuesta se devuelven como un vector columna con la misma longitud que t. Por ejemplo, extraiga la respuesta de un sistema SISO para una onda cuadrada. Cree la onda cuadrada con gensig.
sys = tf([2 5 1],[1 2 3]);
[u,t] = gensig("square",4,10,0.05);
[y,t] = lsim(sys,u,t);
size(y)ans = 1×2
201 1
El vector y contiene la respuesta simulada en cada unidad de tiempo en t. (Para facilitarlo, lsim devuelve el vector tiempo t).
En un sistema MIMO, los datos de respuesta se devuelven en un arreglo de dimensiones N por Ny por Nu, donde Ny y Nu son el número de salidas y entradas del sistema dinámico. Por ejemplo, considere el siguiente modelo en espacio de estados, que representa un sistema de tres estados con dos entradas y tres salidas.
A = [-1.5 -0.2 1.0;
-0.2 -1.7 0.6;
1.0 0.6 -1.4];
B = [ 1.5 0.6;
-1.8 1.0;
0 0 ];
C = [ 0 -0.1 -0.2;
0.7 -0.2 -0.3
-0.65 0 -0.6];
D = [ 0.1 0;
0.1 1.5
0 0];
sys = ss(A,B,C,D);Extraiga las respuestas de los tres canales de salida para la onda cuadrada aplicada en ambas entradas.
uM = [u u]; [y,t] = lsim(sys,uM,t); size(y)
ans = 1×2
201 3
y(:,j) es un vector columna que contiene la respuesta en la j-ésima salida a la onda cuadrada aplicada a ambas entradas. Es decir, y(i,:) es un vector con tres valores: los valores de salida en la en la i-ésima unidad de tiempo.
Dado que sys es un modelo en espacio de estados, puede extraer la evolución del tiempo de los valores de estado en respuesta a la señal de entrada.
[y,t,x] = lsim(sys,uM,t); size(x)
ans = 1×2
201 3
Cada fila de x contiene los valores de estado [x1,x2,x3] en el tiempo correspondiente t. Dicho de otra forma, x(i,:) es el vector de estado en la i-ésima unidad de tiempo. Represente los valores de estado.
plot(t,x)

El ejemplo Plot Response of Multiple Systems to Same Input (Representar la respuesta de múltiples sistemas para la misma entrada) muestra cómo representar respuestas de múltiples sistemas individuales en un único eje. Cuando tiene múltiples sistemas dinámicos en un arreglo de modelos, lsim representa todas sus respuestas a la vez.
Cree un arreglo de modelos. Para este ejemplo, utilice un arreglo unidimensional de funciones de transferencia de segundo orden con diferentes frecuencias naturales. Primero, asigne previamente memoria para el arreglo de modelos. El siguiente comando crea una fila de 1 por 5 de funciones de transferencia SISO de ganancia cero. Las primeras dos dimensiones representan las salidas y entradas del modelo. Las dimensiones restantes son las dimensiones del arreglo. (Para más información sobre los arreglos de modelos y cómo crearlos, consulte Model Arrays (Control System Toolbox)).
sys = tf(zeros(1,1,1,5));
Rellene el arreglo.
w0 = 1.5:1:5.5; % natural frequencies zeta = 0.5; % damping constant for i = 1:length(w0) sys(:,:,1,i) = tf(w0(i)^2,[1 2*zeta*w0(i) w0(i)^2]); end
Represente las respuestas de todos los modelos en el arreglo para una entrada de onda cuadrada.
[u,t] = gensig("square",5,15);
lsim(sys,u,t)
lsim utiliza el mismo estilo de línea para las respuestas de todas las entradas del arreglo. Una manera de distinguir entre las entradas es utilizar la propiedad SamplingGrid de los modelos de sistemas dinámicos para asociar cada entrada del arreglo con el valor w0 correspondiente.
sys.SamplingGrid = struct('frequency',w0);Cuando represente las respuestas en una ventana de figuras de MATLAB®, puede hacer clic en una traza para ver a qué valor de frecuencia corresponde.
Cargue los datos de estimación para estimar un modelo.
load dcmotordata z = iddata(y,u,0.1,'Name','DC-motor');
z es un objeto iddata que almacena los datos de estimación de una entrada y dos salidas con un tiempo de muestreo de 0,1 s.
Realice una estimación de un modelo en espacio de estados de orden 4 con los datos de estimación z.
[sys,x0] = n4sid(z,4);
sys es el modelo estimado y x0, los estados iniciales estimados.
Simule la respuesta de sys con los mismos datos de entrada que los utilizados para la estimación y los estados iniciales devueltos por el comando de estimación.
[y,t,x] = lsim(sys,z.InputData,[],x0);
En este caso, y es la respuesta del sistema, t es el vector de tiempo usado para la simulación y x es la trayectoria de estado.
Compare la respuesta simulada y con la respuesta medida z.OutputData para ambas salidas.
subplot(211), plot(t,z.OutputData(:,1),'k',t,y(:,1),'r') legend('Measured','Simulated') subplot(212), plot(t,z.OutputData(:,2),'k',t,y(:,2),'r') legend('Measured','Simulated')

Para este ejemplo, fcnMaglev.m define las matrices y las compensaciones de un sistema de levitación magnética. La levitación magnética controla la altura de una bola levitante usando una corriente de bobina que genera una fuerza magnética sobre la bola. Este ejemplo simula el modelo en un lazo abierto.
Cree un modelo LPV.
lpvSys = lpvss('h',@fcnMaglev)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
Puede establecer propiedades adicionales con notación de puntos.
lpvSys.StateName = {'h','hdot'};
lpvSys.InputName = 'current';
lpvSys.InputName = 'height';Simule la respuesta de este modelo a una corriente de entrada sinusoidal arbitraria.
h0 = 1; [~,~,~,~,~,~,x0,u0,~] = fcnMaglev([],h0); ic = findop(lpvSys,0,h0,x=x0,u=u0); t = 0:1e-3:1; u = u0*(1+0.1*sin(10*t)); y = lsim(lpvSys,u,t,ic,@(t,x,u) x(1));
Represente la respuesta gráficamente.
plot(t,y,t,u/u0) legend('height','current')

El imán atrae la bola cuando la corriente aumenta por primera vez (h disminuye). La posterior disminución de la corriente no es suficiente para que vuelva atrás.
h = 0 es una singularidad para este modelo, es decir, la bola choca contra el imán. El modelo LPV deja de ser válido en este punto.
La elección del tiempo de muestreo puede afectar a los resultados de la simulación radicalmente. Para ilustrarlo, considere el siguiente modelo de segundo orden.
Simule la respuesta de este modelo a una onda cuadrada con un periodo de 1 s y utilice un tiempo de muestreo de 0,1 s.
w2 = 62.83^2;
sys = tf(w2,[1 2 w2]);
tau = 1;
Tf = 5;
Ts = 0.1;
[u,t] = gensig("square",tau,Tf,Ts);
lsim(sys,u,t)
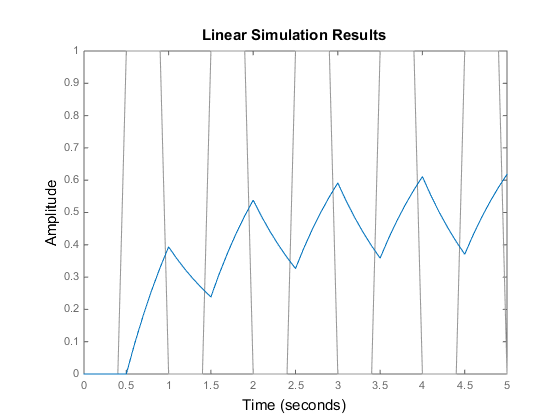
lsim simula el modelo con la señal de entrada especificada, pero genera una advertencia de que la señal de entrada está submuestreada. lsim recomienda un tiempo de muestreo que genere al menos 64 muestras por periodo de la entrada u. Para comprender la importancia de esta recomendación, simule sys de nuevo con un tiempo de muestreo más corto que el máximo recomendado.
figure
Ts2 = 0.01;
[u2,t2] = gensig("square",tau,Tf,Ts2);
lsim(sys,u2,t2)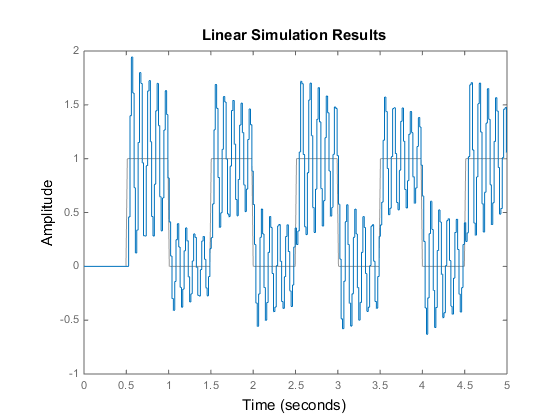
Esta respuesta presenta un comportamiento oscilatorio considerable que está oculto en la versión submuestreada.
Este ejemplo muestra cómo usar las simulaciones personalizadas para obtener datos de captura instantánea de estado y realizar la reducción de orden de modelos de POD. De forma predeterminada, el algoritmo de POD proporciona tres tipos de señales de excitación integradas (chirp, impulso y PRBS) para realizar simulaciones. El software simula el modelo, extrae los datos de capturas instantáneas de estado y aproxima los gramianos de controlabilidad y observabilidad. También puede proporcionar datos de POD personalizados generados a partir de una simulación con incrementalPOD y lsim.
Genere un modelo en espacio de estados aleatorio con 30 estados, una entrada y una salida, y cree una tarea de reducción de orden de modelos.
rng(0)
sys = rss(30,1,1);
R = reducespec(sys,"pod");Para este ejemplo, cree una señal sinusoidal superpuesta como señal de entrada para las simulaciones en curso.
t = linspace(0,100,10000); u = 0.5*(sin(1.*t)+sin(3.*t)+sin(5.*t)+sin(8.*t)+sin(10.*t));
Cree objetos POD incrementales para almacenar la aproximación de los gramianos de accesibilidad y observabilidad.
rPOD = incrementalPOD; oPOD = incrementalPOD;
Realice simulaciones del modelo de planta y su adjunto con la señal de entrada personalizada u.
[~,~,~,~,rPOD] = lsim(sys,u,t,rPOD); asys = adjoint(sys); [~,~,~,~,oPOD] = lsim(asys,u,t,oPOD);
lsim genera los datos de capturas instantáneas de estado y devuelve los datos de POD personalizados como salida. Estos datos se generan en un formato compatible con R.Options.
Especifique los datos personalizados y ejecute el algoritmo de reducción de modelos. Cuando especifica las opciones CustomLr y CustomLo, el software omite las simulaciones integradas y utiliza los datos como están.
R.Options.CustomLr = rPOD; R.Options.CustomLo = oPOD; R = process(R);
Ahora puede seguir el flujo de trabajo típico seleccionando el orden y obteniendo el modelo de orden reducido.
Obtenga un modelo de orden reducido que no considere el 0.01% de la energía total.
rsys = getrom(R,MaxLoss=1e-4); order(rsys)
ans = 9
bodeplot(sys,rsys,"r--") legend("Original","Reduced")

ans =
Legend (Original, Reduced) with properties:
String: {'Original' 'Reduced'}
Location: 'northeast'
Orientation: 'vertical'
FontSize: 8.1000
Position: [0.7707 0.8532 0.1875 0.0923]
Units: 'normalized'
Show all properties
El modelo reducido proporciona una buena aproximación del modelo de orden completo.
Cree un modelo en espacio de estados con coeficientes complejos.
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
Calcule la respuesta del sistema para una onda cuadrada con un periodo de 4 s.
[u,t] = gensig("square",4,12);
[y,tout] = lsim(sys,u,t);Los datos de respuesta resultantes contienen valores de salida complejos.
y
Argumentos de entrada
Argumentos de salida
Sugerencias
Cuando necesite opciones de personalización de gráficas adicionales, utilice en su lugar
lsimplot.Las gráficas creadas con
lsimno admiten títulos ni etiquetas multilínea especificados como arreglos de cadenas o arreglos de celdas de vectores de caracteres. Para especificar títulos y etiquetas multilínea, utilice una cadena única con un carácternewline.lsim(sys,u,t) title("first line" + newline + "second line");
Algoritmos
En una función de transferencia en tiempo discreto,
lsim filtra la entrada en función de la recursión asociada con esta función de transferencia:
En el caso de modelos zpk en tiempo discreto, lsim filtra la entrada a través de una serie de secciones de primer y segundo orden. Este enfoque evita que se formen numerador y denominador polinomiales, que pueden provocar inestabilidad numérica para modelos de órdenes superiores.
En el caso de modelos en espacio de estados en tiempo discreto, lsim propaga las ecuaciones en espacio de estados en tiempo discreto
En el caso de sistemas en tiempo continuo, lsim discretiza, en primer lugar, el sistema con c2d y, a continuación, propaga las ecuaciones en espacio de estados en tiempo discreto resultantes. A menos que especifique lo contrario con el argumento de entrada method, lsim utiliza el método de discretización de retención de primer orden cuando la señal de entrada es suave, y de retención de orden cero cuando la señal de entrada es discontinua, como en el caso de pulsos u ondas cuadradas. El tiempo de muestreo para la discretización es el espaciamiento dT entre las muestras de tiempo proporcionado en t.
Para modelos dispersos en tiempo continuo, así como LTV y LPV, lsim usa solvers de paso fijo basados en los métodos trbdf o hht (consulte la propiedad SolverOptions de los modelos sparss y mechss).