Sistemas de coordenadas de imagen
Puede acceder a ubicaciones en imágenes usando varios sistemas de coordenadas de imagen diferentes. Puede especificar ubicaciones usando índices de píxeles discretos porque las imágenes se almacenan como arreglos. También puede especificar ubicaciones mediante coordenadas espaciales continuas, ya que las imágenes representan escenas del mundo real en un espacio continuo.
Índices de píxeles
Tal como se describe en Imágenes en MATLAB, MATLAB® almacena la mayoría de las imágenes como arreglos. Cada índice (fila, columna) del arreglo corresponde a un único píxel de la imagen mostrada.
Existe una correspondencia unívoca entre los índices de píxeles y los subíndices de las dos primeras dimensiones de la matriz. De forma similar a la indexación de arreglos en MATLAB, los índices de píxeles son valores enteros y van desde 1 hasta la longitud de la fila o columna. Los índices se ordenan de arriba abajo y de izquierda a derecha.
Por ejemplo, los datos del píxel de la quinta fila, segunda columna se almacenan en el elemento de matriz (5, 2). Para acceder a los valores de los píxeles individuales se utiliza la notación de subíndices normal de matrices de MATLAB. Por ejemplo, el código de MATLAB
I(2,15)
devuelve el valor del píxel de la fila 2, columna 15 de la imagen I de un solo canal. Del mismo modo, el código de MATLAB
RGB(2,15,:)
devuelve los valores de color del píxel de la fila 2, columna 15 de la imagen RGB multicanal.
Coordenadas espaciales
En un sistema de coordenadas espaciales, las ubicaciones de una imagen son posiciones en un plano continuo. Las ubicaciones se describen en términos de coordenadas cartesianas x e y (y no de índices de filas y columnas como en el sistema de indexación de píxeles). Desde esta perspectiva cartesiana, una coordenada (x, y) como (3.2, 5.3) es significativa y distinta de la coordenada (5, 3).
Image Processing Toolbox™ define dos tipos de sistemas de coordenadas espaciales en función del marco de referencia. Las coordenadas intrínsecas especifican ubicaciones con respecto al marco de referencia de la imagen. Las coordenadas mundiales especifican ubicaciones con respecto a un observador del mundo externo.
Coordenadas intrínsecas
De forma predeterminada, la toolbox define las coordenadas espaciales de la imagen utilizando el sistema de coordenadas intrínsecas. Este sistema de coordenadas espaciales corresponde a los índices de píxeles de la imagen. Las coordenadas intrínsecas (x, y) del punto central de cualquier píxel son idénticas a los índices de columna y fila de ese píxel. Por ejemplo, el punto central del píxel de la fila 5, columna 3 tiene las coordenadas espaciales x = 3.0 e y = 5.0. Sin embargo, tenga en cuenta que el orden de las coordenadas intrínsecas (3.0, 5.0) está invertido con respecto a los índices de píxeles (5, 3).
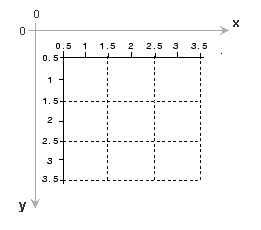
Las coordenadas intrínsecas del centro de cada píxel tienen un valor entero. El centro del píxel superior izquierdo tiene coordenadas intrínsecas (1.0, 1.0). El centro del píxel inferior derecho tiene coordenadas intrínsecas (numCols, numRows), donde numCols y numRows son el número de columnas y filas de la imagen, respectivamente. En general, el centro del píxel con índices de píxel (fila, columna) (r, c) tiene coordenadas espaciales x = c e y = r en el sistema de coordenadas intrínsecas.
Dado que el tamaño de cada píxel en el sistema de coordenadas intrínsecas es de una unidad, los límites de la imagen tienen coordenadas fraccionarias. La esquina superior izquierda de la imagen se sitúa en (0.5, 0.5), no en (0, 0). Del mismo modo, la esquina inferior derecha de la imagen se sitúa en (numCols + 0.5, numRows + 0.5).
Varias funciones trabajan principalmente con coordenadas espaciales en lugar de índices de píxeles, pero siempre que utilice el sistema de coordenadas espaciales predeterminado (coordenadas intrínsecas), puede especificar las ubicaciones en relación con sus columnas (x) y filas (y).
Para imágenes 3D, el eje z apunta a la página siguiendo un sistema de coordenadas para diestros. Las coordenadas intrínsecas (x, y, z) del punto central de cualquier vóxel son idénticas a los índices de columna, fila y plano de ese vóxel. Por ejemplo, el punto central del vóxel de la fila 5, columna 3, página 2 tiene las coordenadas espaciales x = 3.0, y = 5.0 y z = 2.0.  De manera similar a las imágenes 2D, las coordenadas intrínsecas del centro de cada vóxel en una imagen 3D tienen valores enteros, y el tamaño de cada vóxel es una unidad. Para imágenes multidimensionales con más de tres dimensiones, los ejes después del eje z corresponden de manera similar a los índices de un arreglo después de la tercera dimensión.
De manera similar a las imágenes 2D, las coordenadas intrínsecas del centro de cada vóxel en una imagen 3D tienen valores enteros, y el tamaño de cada vóxel es una unidad. Para imágenes multidimensionales con más de tres dimensiones, los ejes después del eje z corresponden de manera similar a los índices de un arreglo después de la tercera dimensión.
Coordenadas mundiales
Un sistema de coordenadas mundiales (también conocido como sistema de coordenadas espaciales no predeterminado) atenúa varias restricciones del sistema de coordenadas intrínsecas. En un sistema de coordenadas mundial, los píxeles o vóxeles pueden tener cualquier longitud, ancho o profundidad, y pueden estar centrados en cualquier coordenada.
Algunas situaciones en las que puede utilizar un sistema de coordenadas mundial en 2D, 3D o imágenes multidimensionales son las siguientes:
Cuando se realiza una transformación geométrica, como una traslación, en una imagen y se desea conservar la información sobre la relación entre la nueva posición y la posición original.
Cuando los píxeles o vóxeles no son isotrópicos. Por ejemplo, en las imágenes por resonancia magnética (IRM), se pueden recoger datos de forma que los vóxeles tengan una frecuencia de muestreo mayor en las direcciones x e y que en la dirección z.
Cuando sabe cómo se corresponde la extensión de los píxeles o vóxeles con las posiciones en el mundo real. Por ejemplo, en una fotografía aérea, cada píxel puede cubrir una parcela específica de 5 por 5 metros sobre el terreno.
Cuando desea invertir la dirección de cualquiera de los ejes. Se trata de una técnica habitual con datos geoespaciales.
Hay varias formas de definir un sistema de coordenadas mundiales. Puede definir un sistema de coordenadas mundial utilizando objetos de referencia espacial, que codifican la ubicación de la imagen en un sistema de coordenadas mundial, la resolución de la imagen y cómo se relaciona la extensión de la imagen con las coordenadas intrínsecas y mundiales. También puede codificar las coordenadas máxima y mínima en cada dimensión en los objetos de referencia espacial. Para obtener más información, consulte Define World Coordinate System of Image.