removeHiddenPoints
Syntax
Description
ptCloudOut = removeHiddenPoints(ptCloudIn,viewPoint)ptCloudIn. The function
removes the points hidden when viewing the point cloud from the specified viewpoint
viewPoint. Determining the visibility of a point can be useful for
shadow casting, reconstruction, and camera placement.
ptCloudOut = removeHiddenPoints(ptCloudIn,viewPoint,RadiusScale=rScale)
[
returns the indices of the points visible from the specified viewpoint, using any
combination of input arguments from previous syntaxes.ptCloudOut,indices] = removeHiddenPoints(___)
Examples
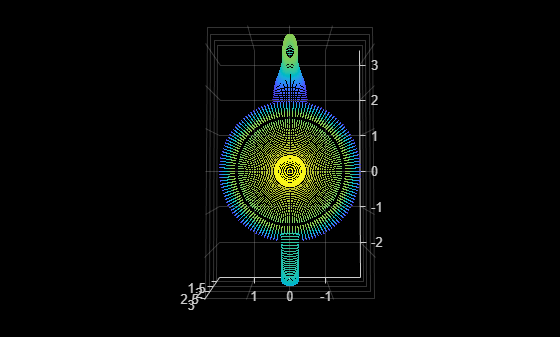
Read point cloud data from a PLY file into the workspace.
ptCloud = pcread("teapot.ply");Define the viewpoint.
viewPosition = [0 0 13];
Compute the indices of the visible points in the point cloud from the specified viewpoint, and remove the hidden points.
[ptCloudOut,indices] = removeHiddenPoints(ptCloud,viewPosition);
Display the visible points.
pcshow(ptCloudOut) campos(viewPosition)
Input Arguments
Output Arguments
Algorithms
The function uses these steps to determine the visible points in a point cloud from a specified viewpoint.
Associate the point cloud with a coordinate system whose center lies at the viewpoint.
Perform inversion using spherical projection.
Create a sphere of radius R such that all points in the point cloud lie within the sphere. You can control the radius value by using the
rScaleinput.Transform the point cloud by reflecting each point, with respect to the sphere, along the line joining the point and the viewpoint.
Calculate a convex hull of the transformed point cloud and the viewpoint. The points inside the convex hull are the visible points.
Extended Capabilities
Version History
Introduced in R2023a