Sine-Cosine Lookup
Libraries:
Motor Control Blockset /
Controls /
Math Transforms
Description
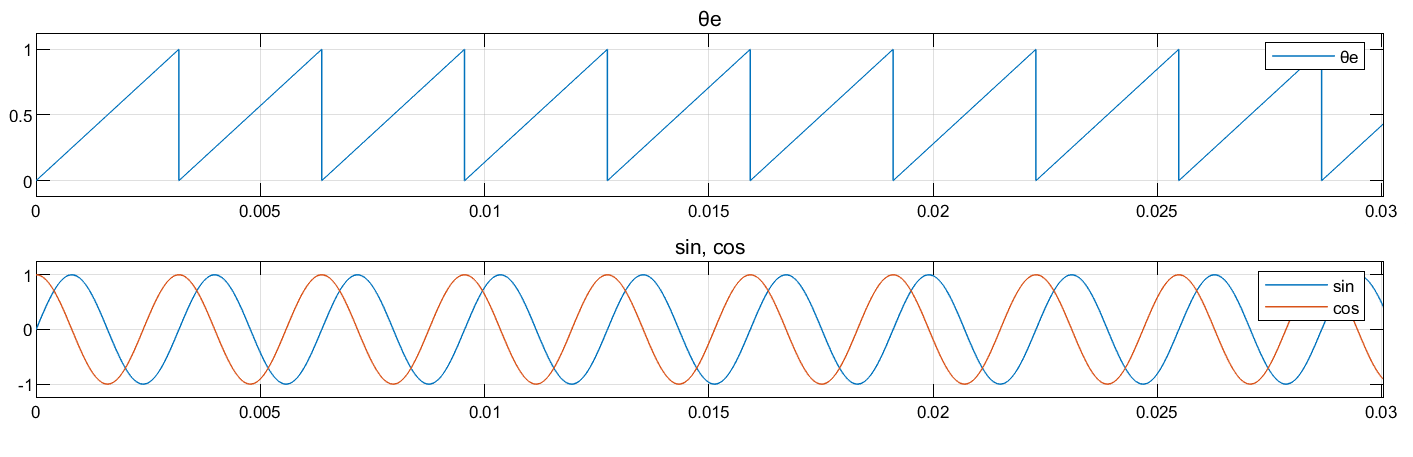
The Sine-Cosine Lookup block implements sine and cosine functions using the specified position or phase input signal.
The block uses the lookup table approach. This approach results in optimized code-execution when used with the model settings and configuration adopted by the examples shipped in Motor Control Blockset™. You can specify the number of lookup table points in the Number of data points for lookup table parameter.
This figure shows the input position and the generated sine and cosine output signals:
Examples



Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2020a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)