brcsSignature
Description
brcsSignature creates a bistatic radar cross section (BRCS)
signature object. You can use this object to model an angle-dependent and frequency-dependent
radar cross section (RCS) pattern. Bistatic radars are systems in which the transmitter and
receiver are not co-located. The bistatic radar cross section of a target is a measure of the
energy scattered from the target in the direction of the receiver.
Creation
Description
brcsSig = brcsSignaturebrcsSignature object, brcsSig, that models a
platform with a 10 dBsm cross section at all transmit and receive angles.
brcsSig = brcsSignature(PropertyName=Value)brcsSignature object, brcsSig, with each
specified PropertyName set to the corresponding
Value. You can specify additional pairs of arguments in any order
as
(PropertyName1=Value1,...,PropertyNameN=ValueN).
Properties
Object Functions
value | Bistatic radar cross section (BRCS) values at specified angles and frequencies |
Examples
This example shows how to import mean bistatic radar cross section (BRCS) data from the NASA almond-shaped test body, assign it to a brcsSignature object, plot a pattern, and obtain the BRCS value at specified transmit and receive angles and frequency.
Import and Plot Data
The NASA bistatic RCS (BRCS) was simulated for transmit and receive azimuth angles between -180 and 180 degrees in 10 degree increments. Obtain the value of the pattern for a transmit azimuth of 0 degrees and receive azimuth of 30 degrees for transmit and receive elevations of 0 degrees.
Import and load NASA almond data.
nasaAlmond = stlread('nasaAlmond.stl'); trimesh(nasaAlmond) axis equal title('NASA Almond')
load('nasaAlmondBRCS.mat','brcsAlmond');
Create a BRCS signature from the pattern.
brcs = brcsSignature(Pattern=brcsAlmond.Pattern01, ... TransmitAzimuth=brcsAlmond.TransmitAzimuth, ... ReceiveAzimuth=brcsAlmond.ReceiveAzimuth, ... Elevation=brcsAlmond.Elevation01)
brcs =
brcsSignature with properties:
Pattern: [37×37 double]
ReceiveAzimuth: [-180 -170 -160 -150 -140 -130 -120 -110 -100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180]
TransmitAzimuth: [-180 -170 -160 -150 -140 -130 -120 -110 -100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180]
Elevation: [2×1 double]
Frequency: 300000000
Plot the BRCS pattern.
figure imagesc(brcs.TransmitAzimuth,brcs.ReceiveAzimuth,brcs.Pattern) title('BRCS (dBsm)') xlabel('Transmit Azimuth (deg)') ylabel('Receive Azimuth (deg)') colorbar
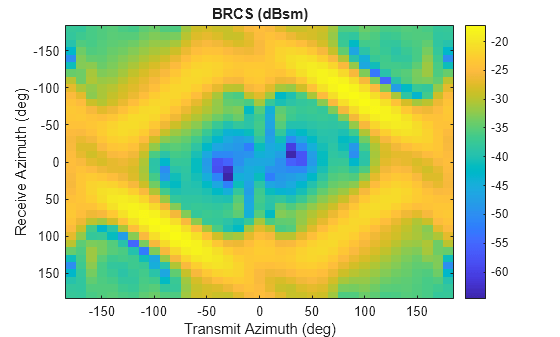
Obtain the value of the patern for a transmit azimuth of 0 degrees and receive azimuth of 30 degrees for transmit and receive elevations of 0 degrees. Units are in dBsm.
value(brcs,[0; 0],[30; 0],2e9)
ans = -38.6897
References
Extended Capabilities
Version History
Introduced in R2026a