Filtrar señales de entrada y proporcionar derivadas de tiempo
Si utiliza un solver explícito tal vez necesite proporcionar derivadas de tiempo de algunas de las señales de entrada. Una forma de proporcionar las derivadas de entrada necesarias es filtrar la entrada a través de un filtro paso bajo. El filtrado de entrada suaviza la señal de entrada y generalmente mejora el rendimiento del modelo. Como ventaja adicional, el motor de Simscape™ calcula las derivadas de tiempo de la entrada filtrada. El filtro de primer orden proporciona una derivada, mientras que el filtro de segundo orden proporciona la primera y segunda derivadas. Si utiliza el filtrado de entrada, es muy importante seleccionar el valor apropiado para la constante de tiempo del filtro.
La constante de tiempo del filtro controla el filtrado de la señal de entrada. La entrada filtrada sigue a la entrada real, pero suavizada, con un desfase del orden de la constante de tiempo que elija. Establezca la constante de tiempo en un valor no superior al intervalo de tiempo más pequeño del sistema de interés. Si elige una constante de tiempo muy pequeña, la señal de entrada filtrada se acercará más a la señal de entrada real. No obstante, esta señal de entrada filtrada aumenta la rigidez del sistema y ralentiza la simulación.
En lugar de utilizar el filtrado de entrada, puede proporcionar derivadas de tiempo para la señal de entrada directamente, como señales adicionales de Simulink®.
En el caso de señales constantes por tramos, también puede establecer explícitamente las derivadas de entrada en cero.
Puede controlar la forma en la que proporciona las derivadas de tiempo para cada señal de entrada configurando el bloque Simulink-PS Converter conectado a esa señal de entrada:
Abra el cuadro de diálogo del bloque Simulink-PS Converter.
Amplíe la sección Input Handling.
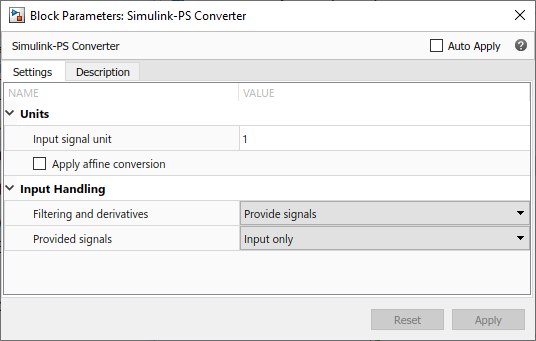
Cuando se añade un nuevo bloque Simulink-PS Converter al modelo, las opciones predeterminadas de gestión de entradas son
Provide signalsyInput only, y el bloque tiene un puerto de entrada de Simulink y un puerto de salida de señal física.Para activar el filtrado de entradas, establezca el parámetro Filtering and derivatives en
Filter input, derivatives calculated. Seleccione el filtro de primer o segundo orden utilizando el parámetro Input filtering order y establezca el valor adecuado del parámetro Input filtering time constant (in seconds) para el modelo.Para evitar filtrar la señal de entrada, mantenga el parámetro Filtering and derivatives como
Provide signals. Luego, establezca el valor del parámetro Provided signals:Input and first derivative: si selecciona esta opción, aparece un puerto de entrada de Simulink adicional en el bloque Simulink-PS Converter para que pueda conectar la señal que proporciona la derivada de entrada.Input and first two derivatives: si selecciona esta opción, aparecen dos puertos de entrada de Simulink adicionales en el bloque Simulink-PS Converter para que pueda conectar las señales que proporcionan las derivadas de entrada.
Por último, si la señal de entrada es constante por tramos (como un paso), también puede establecer explícitamente las derivadas de entrada en cero seleccionando el valor
Zero derivatives (piecewise constant)para el parámetro Filtering and derivatives.