Continuous
Utilice bloques de la biblioteca Continuous para modelar ecuaciones diferenciales. Puede tomar la derivada de tiempo de una señal. Puede integrar o retrasar una señal. Puede modelar los controladores PID y los sistemas lineales utilizando representaciones de la función de transferencia o de espacio de estados.
Bloques
| Derivative | Calcular la derivada continua aproximada de la señal de entrada continua con respecto al tiempo |
| Descriptor State-Space | Model continuous linear system as system of implicit state-space equations |
| Entity Transport Delay | Introduce a delay in propagation of a SimEvents message |
| First Order Hold | Implement linearly extrapolated first order hold on input signal |
| Integrator | Integrate signal |
| Integrator Limited | Integrate signal |
| PID Controller | Continuous-time or discrete-time PID controller |
| PID Controller (2DOF) | Continuous-time or discrete-time two-degree-of-freedom PID controller |
| Second-Order Integrator | Second-order integration of input signal |
| Second-Order Integrator Limited | Second-order integration of input signal |
| State-Space | Implementar un sistema de espacio de estados lineal |
| Transfer Fcn | Modelar un sistema lineal como una función de transferencia |
| Transport Delay | Retrasar entrada por la cantidad de tiempo especificada |
| Variable Time Delay | Delay input by variable amount of time |
| Variable Transport Delay | Delay input by variable amount of time |
| Zero-Pole | Model system using zero-pole-gain transfer function |
Temas
- Model a Continuous System
Model a system with variables defined at all time values.
Ejemplos destacados
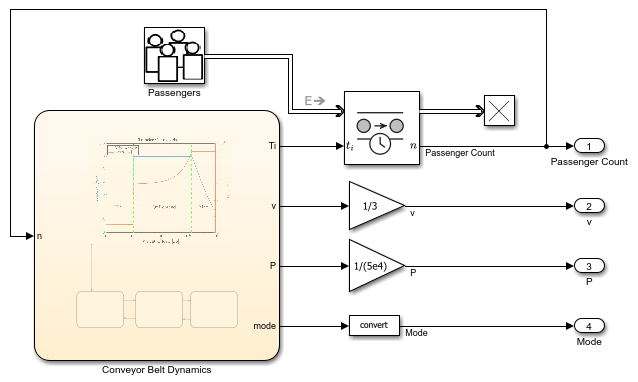
Model Conveyor Belt as Cyber-Physical System
Model a variable-speed conveyor belt as a cyber-physical system by combining continuous-time, discrete-event, and finite-state modeling techniques. The model in this example integrates the modeling techniques required to represent the cyber-physical system into a single simulation environment by using Simulink®, SimEvents®, and Stateflow®.
Recursos de formación

Hardware virtual y laboratorios para controles
Aprenda cómo crear sistemas de control por retroalimentación de lazo abierto/cerrado, el cálculo de funciones de transferencia y la realización de análisis de posición.