Verify PID Design in Your Simulink Model
In PID Tuner, you tune the compensator using a linear model of your plant. First, you find a good compensator design in PID Tuner. Then, verify that the tuned controller meets your design requirements when applied to the nonlinear plant in your Simulink® model.
To verify the compensator design in the nonlinear Simulink model:
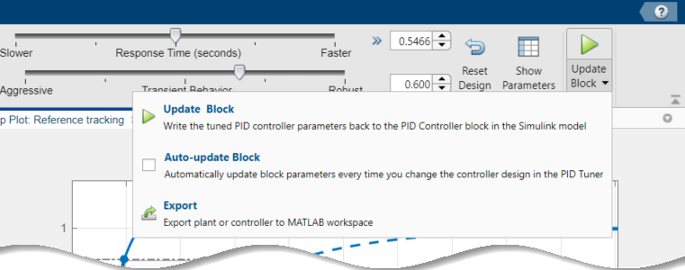
On the PID Tuner tab, click
 to update the Simulink PID controller block with the tuned PID parameters.
to update the Simulink PID controller block with the tuned PID parameters.Tip
To update PID block parameters automatically as you tune the controller in PID Tuner, click Update Block and check Auto-update block.
Simulate the Simulink model, and evaluate whether the simulation output meets your design requirements.
Because PID Tuner works with a linear model of your plant, the simulated response sometimes does not match the response in PID Tuner. See Simulated Response Does Not Match PID Tuner Response for more information.
If the simulated response does not meet your design requirements, see Cannot Find Acceptable PID Design in Simulated Model.