Saturable Transformer
(To be removed) Implement two- or three-winding saturable transformer
The Specialized Power Systems library will be removed in R2026a. Use the Simscape™ Electrical™ blocks and functions instead. For more information on updating your models, see Upgrade Specialized Power Systems Models to use Simscape Electrical Blocks.

Libraries:
Simscape /
Electrical /
Specialized Power Systems /
Power Grid Elements
Description
The Saturable Transformer block model shown consists of three coupled windings wound on the same core.

The model takes into account the winding resistances (R1 R2 R3) and the leakage inductances (L1 L2 L3) as well as the magnetizing characteristics of the core, which is modeled by a resistance Rm simulating the core active losses and a saturable inductance Lsat.
You can choose one of the following two options for the modeling of the nonlinear flux-current characteristic
Model saturation without hysteresis. The total iron losses (eddy current + hysteresis) are modeled by a linear resistance, Rm.
Model hysteresis and saturation. Specification of the hysteresis is done by means of the Hysteresis Design Tool of the Powergui block. The eddy current losses in the core are modeled by a linear resistance, Rm.
Note
Modeling the hysteresis requires additional computation load and therefore slows down the simulation. The hysteresis model should be reserved for specific applications where this phenomenon is important.
Saturation Characteristic Without Hysteresis
When the hysteresis is not modeled, the saturation characteristic of the Saturable Transformer block is defined by a piecewise linear relationship between the flux and the magnetization current.

Therefore, if you want to specify a residual flux, phi0, the second point of the saturation characteristic should correspond to a null current, as shown in the figure (b).
The saturation characteristic is entered as (i, phi) pair values in per units, starting with pair (0, 0). The software converts the vector of fluxes Φpu and the vector of currents Ipu into standard units to be used in the saturation model of the Saturable Transformer block:
| Φ = ΦpuΦbaseI = IpuIbase, | (1) |
where the base flux linkage (Φbase) and base current (Ibase) are the peak values obtained at nominal voltage power and frequency:
The base flux is defined as the peak value of the sinusoidal flux (in webers) when winding 1 is connected to a 1 pu sinusoidal voltage source (nominal voltage). The Φbase value defined above represents the base flux linkage (in volt-seconds). It is related to the base flux by the following equation:
| Φbase = Base flux × number of turns of winding 1. | (2) |
When they are expressed in pu, the flux and the flux linkage have the same value.
Saturation Characteristic with Hysteresis
The magnetizing current I is computed from the flux Φ obtained by integrating voltage across the magnetizing branch. The static model of hysteresis defines the relation between flux and the magnetization current evaluated in DC, when the eddy current losses are not present.
The hysteresis model is based on a semi-empirical characteristic, using an arctangent analytical expression Φ(I) and its inverse I(Φ) to represent the operating point trajectories. The analytical expression parameters are obtained by curve fitting empirical data defining the major loop and the single-valued saturation characteristic. The Hysteresis design tool of the Powergui block is used to fit the hysteresis major loop of a particular core type to basic parameters. These parameters are defined by the remanent flux (Φr), the coercive current (Ic), and the slope (dΦ/dI) at (0, Ic) point as shown in the next figure.
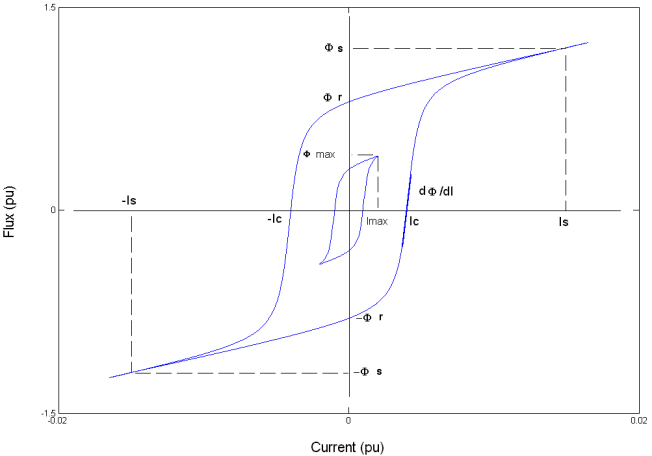
The major loop half cycle is defined by a series of N equidistant points connected by line segments. The value of N is defined in the Hysteresis design tool of the Powergui block. Using N = 256 yields a smooth curve and usually gives satisfactory results.
The single-valued saturation characteristic is defined by a set of current-flux pairs defining a saturation curve which should be asymptotic to the air core inductance Ls.
The main characteristics of the hysteresis model are summarized below:
A symmetrical variation of the flux produces a symmetrical current variation between -Imax and +Imax, resulting in a symmetrical hysteresis loop whose shape and area depend on the value of Φmax. The major loop is produced when Φmax is equal to the saturation flux (Φs). Beyond that point the characteristic reduces to a single-valued saturation characteristic.
In transient conditions, an oscillating magnetizing current produces minor asymmetrical loops, as shown in the next figure, and all points of operation are assumed to be within the major loop. Loops once closed have no more influence on the subsequent evolution.

The trajectory starts from the initial (or residual) flux point, which must lie on the vertical axis inside the major loop. You can specify this initial flux value phi0, or it is automatically adjusted so that the simulation starts in steady state.
The Per Unit Conversion
In order to comply with industry practice, the block allows you to specify the resistance and inductance of the windings in per unit (pu). The values are based on the transformer rated power Pn in VA, nominal frequency fn in Hz, and nominal voltage Vn, in Vrms, of the corresponding winding. For each winding the per unit resistance and inductance are defined as
The base resistance and base inductance used for each winding are
For the magnetization resistance Rm, the pu values are based on the transformer rated power and on the nominal voltage of winding 1.
The default parameters of winding 1 specified in the dialog box section give the following base values:
For example, if winding 1 parameters are R1 = 1.44 Ω and L1 = 0.1528 H, the corresponding values to enter in the dialog box are
Assumptions and Limitations
Windings can be left floating (that is, not connected by an impedance to the rest of the circuit). However, the floating winding is connected internally to the main circuit through a resistor. This invisible connection does not affect voltage and current measurements.
Ports
Conserving
Parameters
References
[1] Casoria, S., P. Brunelle, and G. Sybille, “Hysteresis Modeling in the MATLAB/Power System Blockset,” Electrimacs 2002, École de technologie supérieure, Montreal, 2002.
[2] Frame, J.G., N. Mohan, and Tsu-huei Liu, “Hysteresis modeling in an Electro-Magnetic Transients Program,” presented at the IEEE PES winter meeting, New York, January 31 to February 5, 1982.
Extended Capabilities
Version History
Introduced before R2006a