Modelizar un sistema de control de tráfico distribuido con mensajes
Este ejemplo muestra cómo modelizar un sistema de control distribuido para una intersección de carreteras de un solo sentido. Para coordinar el estado de los semáforos, los dos gráficos se comunican entre sí mediante mensajes. El diseño de los dos gráficos es idéntico.
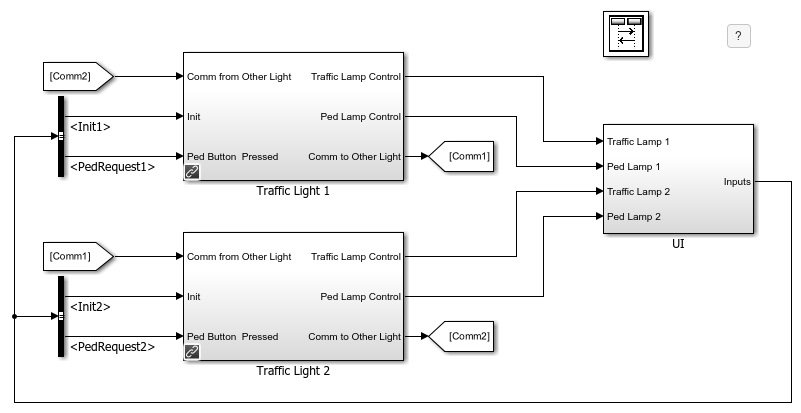
Puede interactuar con las señales de tráfico a través de una interfaz de usuario de MATLAB®. Para solicitar un cruce peatonal, haga clic en uno de los botones de solicitud de color gris oscuro en la parte inferior del semáforo.

El controlador de cada carretera se implementa mediante los subsistemas del controlador de semáforos Traffic Light 1 y Traffic Light 2.

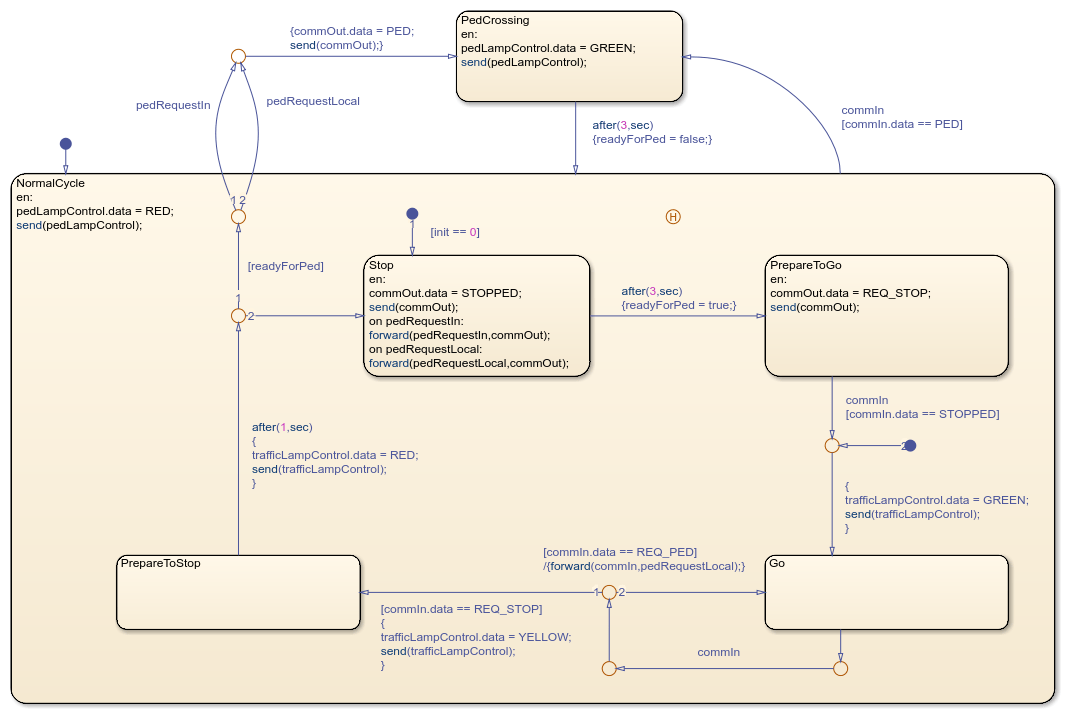
En cada subsistema, el gráfico Controller describe la lógica principal del controlador de tráfico a través de los distintos estados del semáforo.
Este modelo aprovecha estas características semánticas de los mensajes:
Los mensajes no se descartan si no se actúa inmediatamente. Por ejemplo, en este modelo, las solicitudes de los peatones se ponen en cola hasta que el controlador pueda reaccionar a una solicitud cuando el semáforo se ponga en rojo.
Puede configurar bucles de mensajes entre diferentes componentes. Estos bucles no dan como resultado bucles algebraicos en el modelo.
Normalmente, los mensajes de entrada se destruyen al final de la unidad de tiempo en la que se evalúan. Sin embargo, puede conservar estos mensajes de entrada para usarlos en otro momento reenviándolos temporalmente a una cola de "retención" local. Por ejemplo, cuando el gráfico Controller sale del estado
Go, utiliza la cola localpedRequestLocalpara almacenar las solicitudes de los peatones realizadas en la otra carretera. El gráfico busca esas solicitudes más tarde, cuando sale del estadoPrepareToStop.
Para cambiar la velocidad de la simulación, en la pestaña Simulation, seleccione Run > Simulation Pacing. En el cuadro de diálogo Simulation Pacing Options, ajuste la configuración del control deslizante. Para obtener más información, consulte Simulation Pacing Options (Simulink).
Consulte también
Simulation Pacing Options (Simulink)