Control yoyó de satélites
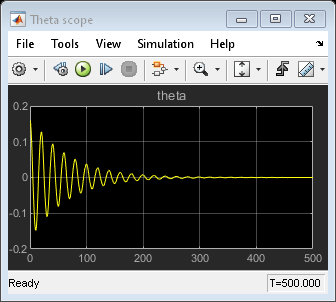
Este ejemplo muestra cómo modelar el sistema de control de un sistema de satélite amarrado. El sistema de satélite consta de un pequeño satélite amarrado a una plataforma en órbita por medio de un amarre largo. Cuando el satélite amarrado oscila, se comporta como un péndulo con mucha libración. Para estabilizar el péndulo, el sistema de control modifica la longitud del amarre soltándolo hasta su longitud máxima cuando el satélite se encuentra en medio de su arco (que reduce su aceleración angular) y recogiéndolo cuando el satélite tiene una velocidad angular igual a cero.
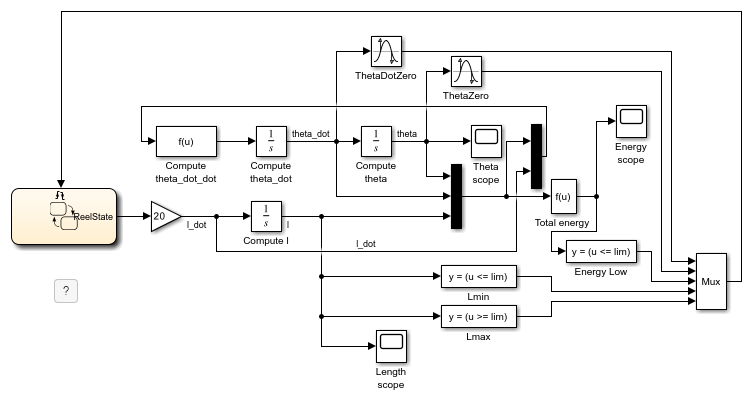
Stateflow® se utiliza para controlar cuándo se recoge o se suelta el amarre usando eventos de entrada de Simulink®.
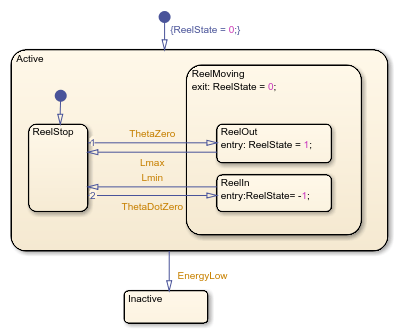
Cuando el satélite se encuentra en el medio de su oscilación (![]() ), el estado
), el estado ReelOut se activa. Cuando el satélite se ha soltado lo máximo posible, el estado ReelStop se activa. Cuando la velocidad angular del satélite alcanza cero, el estado ReelIn se activa. Cuando el amarre es lo más corto posible, el estado ReelStop se activa de nuevo. Finalmente, si la energía total del satélite es demasiado reducida, el sistema se desactiva accediendo al estado Inactive.
Referencias
[1] Dabney, James B. and Harman, Thomas L. Mastering Simulink, 2003.