Customize and Extend Simscape Libraries for a Custom DC Motor
Create custom-equation-based components for the Simscape™ library using the Symbolic Math Toolbox™.
Introduction
The Symbolic Math Toolbox provides a flexible way to develop models from first engineering principles in any spatial dimension. You can develop mathematical models for steady state or transient physics.
You can develop and solve the equations required to represent the physics necessary for your component; and perform your own reduced-order model mapping between the inputs x and a quantity of interest f(x).
Here f is the custom component which can represent governing equations in the form of:
Mathematical formulas
Numerical simulations of ODEs and PDEs
The steps in this examples are
Parameterizing a Simscape™ component using
symReadSSCVariablesDefine custom equations for your Simscape component using
diffSolve steady-state equations analytically using
solveandsubsSolve time-dependent equations numerically in MATLAB® by using
matlabFunctionandode45Create a Simscape component using
symWriteSSC
To run this example, you must have licenses for Simscape and Symbolic Math Toolbox.
DC Motor Model
A DC motor is a device for converting electrical energy into mechanical energy and vice versa. A schematic of a DC motor is shown below (left figure). Blocks that simulate DC motors are provided in Simscape Electrical™ (right figure), which is an optional product for Simscape.
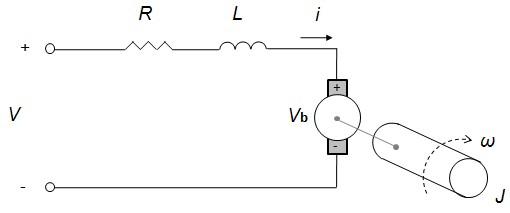
In this example, we will derive a reduced-order model representation of a DC Motor using the governing Ordinary Differential Equations (ODEs). For a DC motor, the electrical voltage and current is derived from Kirchhoff’s laws and the formula of the mechanical torque is derived from Newton’s laws. Using these equations we can implement a custom and parametric Simscape component.
Import Parameters and Variables of Template Component
Suppose you have a Simscape component MyMotorTemplate.ssc in your current folder or on the default MATLAB path. This component has no equations yet. The template records the parameters and variables which will be used to develop our motor. You can use type to provide a preview of that template.
type MyMotorTemplate.ssccomponent MyMotorTemplate
% Custom DC Motor
% This block implements a custom DC motor
nodes
p = foundation.electrical.electrical; % +:left
n = foundation.electrical.electrical; % -:left
r = foundation.mechanical.rotational.rotational; % R:right
c = foundation.mechanical.rotational.rotational; % C:right
end
parameters
R = {3.9, 'Ohm'}; %Armature resistance
L = {0.000012, 'H'}; %Armature inductance
J = {0.000001, 'kg*m^2'}; %Inertia
Dr = {0.000003, '(N*m*s)/rad'}; %Rotor damping
Ki = {0.000072, '(N*m)/A'}; %Torque constant
Kb = {0.000072, '(V*s)/rad'}; %Back-emf constant
end
variables
torque = {0, 'N*m'}; %Total Torque
tau = {0, 'N*m'}; %Electric Torque
w = {0, 'rad/s'}; %Angular Velocity
I = {0, 'A'}; %Current
V = {0, 'V'}; %Applied voltage
Vb = {0, 'V'}; %Counter electromotive force
end
branches
torque : r.t -> c.t; % Through variable tau from r to c
I : p.i -> n.i; % Through variable i from p to n
end
equations
assert(R>0);
w == r.w -c.w; % Across variable w from r to c
V == p.v -n.v; % Across variable v from p to n
end
end
Read the names, values, and units of the parameters from the template component.
[parNames, parValues, parUnits] = symReadSSCParameters('MyMotorTemplate');Display the parameters, their values, and the corresponding units as vectors.
vpa([parNames; parValues; parUnits],10)
ans =
Add the parameter names to the MATLAB Workspace by using the syms function. Parameters appear as symbolic variables in the workspace. You can use who to list variables in the workspace.
syms(parNames) syms
Your symbolic variables are: Dr J Kb Ki L R ans
Read and display the names of the component variables. Use ReturnFunction to simultaneously convert these variables to functions of the variable t.
[varFuns, varValues, varUnits] = symReadSSCVariables('MyMotorTemplate', 'ReturnFunction', true); vpa([varFuns; varValues; varUnits],10)
ans =
Add the variable names to the MATLAB Workspace by using the syms function. Variables appear as symbolic functions in the workspace. Verify that you have declared all required symbolic variables and functions using syms.
syms(varFuns) syms
Your symbolic variables are: Dr I J Kb Ki L R V Vb ans t tau torque w
Define System of Equations for Modeling DC Motor
The differential equations for the mechanical torque are defined as eq1 and eq2. I(t) represents the current and w(t) the angular velocity.
eq1 = torque + J*diff(w(t)) == -Dr*w(t) + tau(t)
eq1(t) =
eq2 = tau(t) == Ki*I(t)
eq2 =
The equations for the electrical voltage and current are eq3 and eq4. V(t) and Vb(t) represent the applied voltage and counter electromotive force respectively.
eq3 = L*diff(I(t)) + R*I(t) == V(t) - Vb(t)
eq3 =
eq4 = Vb(t) == Kb*w(t)
eq4 =
We can list them together. Here, the motor’s torque is assumed to be proportional to the current.
eqs = formula([eq1; eq2; eq3; eq4])
eqs =
Extract the left and right sides of the equations.
operands = children(eqs);
operList = [ operands{:} ];
lhs = operList(1:2:end)lhs=1×4 cell array
{[J*diff(w(t), t) + torque(t)]} {[tau(t)]} {[L*diff(I(t), t) + R*I(t)]} {[Vb(t)]}
rhs = operList(2:2:end)
rhs=1×4 cell array
{[tau(t) - Dr*w(t)]} {[Ki*I(t)]} {[V(t) - Vb(t)]} {[Kb*w(t)]}
The second and fourth equations define the values tau(t) and Vb(t). To simplify the system of four equations to a system of two equations, substitute these values into the first and third equation.
equations(1) = subs(eqs(1), lhs(2), rhs(2))
equations =
equations(2) = subs(eqs(3), lhs(4), rhs(4))
equations =
equations.'
ans =
Before solving the equations, substitute parameters with their numeric values. Also, use V(t) = 1.
equations = subs(equations, [parNames,V(t)], [parValues,1]); equations = subs(equations, torque, 0); vpa(equations.',10)
ans =
Solve Equations for Steady State
For this, remove the time dependency for the functions w(t) and I(t). For example, substitute them with symbolic variables ww and ii.
syms ww ii equations_steady = subs(equations, [w(t),I(t)], [ww,ii]); result = solve(equations_steady,ww,ii); steadyStateW = vpa(result.ww,10)
steadyStateW =
steadyStateI = vpa(result.ii,10)
steadyStateI =
Numerically Simulate Symbolic Expression in MATLAB by Using matlabFunction and ode45
Create a valid input for ode45 from the symbolic equations. Use odeToVectorField to create the MATLAB procedure which represents the dynamical system with the initial condition .
[vfEquations, tVals] = odeToVectorField(equations)
vfEquations =
tVals =
M = matlabFunction(vfEquations,'Vars', {'t','Y'})
M = function_handle with value:
@(t,Y)[Y(1).*(-3.25e+5)-Y(2).*6.0+8.333333333333333e+4;Y(1).*7.2e+1-Y(2).*3.0]
Solve the differential equation using the initial conditions w(0) = 0 and I(0) = 0.
solution = ode45(M,[0 3],[0 0])
solution = struct with fields:
solver: 'ode45'
extdata: [1×1 struct]
x: [0 2.4114e-09 1.4468e-08 7.4754e-08 3.7618e-07 1.8833e-06 4.0507e-06 6.6351e-06 9.6952e-06 1.3333e-05 1.7740e-05 2.3237e-05 3.0371e-05 4.0045e-05 5.2842e-05 6.2514e-05 7.2187e-05 8.3013e-05 9.4295e-05 1.0467e-04 … ] (1×293775 double)
y: [2×293775 double]
stats: [1×1 struct]
idata: [1×1 struct]
Evaluate the solution at the following points in time t=[0.5,0.75,1]. The first value is the current I(t) and the second value is the angular velocity w(t). We see that the solution for the angular velocity is starting to approach a steady state steadyStateW.
deval(solution,0.5), deval(solution,.75), deval(solution,1)
ans = 2×1
0.2563
4.7795
ans = 2×1
0.2563
5.5034
ans = 2×1
0.2563
5.8453
steadyStateW
steadyStateW =
Plot the solution.
time = linspace(0,2.5); iValues = deval(solution, time, 1); wValues = deval(solution, time, 2); steadyStateValuesI = vpa(steadyStateI*ones(1,100),10); steadyStateValuesW = vpa(steadyStateW*ones(1,100),10); figure; plot1 = subplot(2,1,1); plot2 = subplot(2,1,2); plot(plot1, time, wValues, 'blue', time, steadyStateValuesW, '--red', 'LineWidth', 1) plot(plot2, time, iValues, 'green', time, steadyStateValuesI, '--red', 'LineWidth', 1) title(plot1, 'DC Motor - angular velocity') title(plot2, 'DC Motor - current') ylabel(plot1, 'Angular velocity [rad/s]') ylabel(plot2, 'Current [A]') xlabel(plot1, 'time [s]') xlabel(plot2, 'time [s]') legend(plot1, 'w(t)', 'w(t): steady state', 'Location', 'northeastoutside') legend(plot2, 'I(t)', 'I(t): steady state', 'Location', 'northeastoutside')
![Figure contains 2 axes objects. Axes object 1 with title DC Motor - angular velocity, xlabel time [s], ylabel Angular velocity [rad/s] contains 2 objects of type line. These objects represent w(t), w(t): steady state. Axes object 2 with title DC Motor - current, xlabel time [s], ylabel Current [A] contains 2 objects of type line. These objects represent I(t), I(t): steady state.](../examples/symbolic/win64/createMotor_04.png)
Save Your Mathematical Model for Use in Simscape
Generate Simscape code using the original equations eqs.
symWriteSSC('MyMotor.ssc', 'MyMotorTemplate.ssc', eqs, ... 'H1Header', '% Custom DC Motor', ... 'HelpText', {'% This block implements a custom DC motor'})
Display the generated component by using the type command.
type MyMotor.ssccomponent MyMotor
% Custom DC Motor
% This block implements a custom DC motor
nodes
p = foundation.electrical.electrical; % +:left
n = foundation.electrical.electrical; % -:left
r = foundation.mechanical.rotational.rotational; % R:right
c = foundation.mechanical.rotational.rotational; % C:right
end
parameters
R = {3.9, 'Ohm'}; %Armature resistance
L = {0.000012, 'H'}; %Armature inductance
J = {0.000001, 'kg*m^2'}; %Inertia
Dr = {0.000003, '(N*m*s)/rad'}; %Rotor damping
Ki = {0.000072, '(N*m)/A'}; %Torque constant
Kb = {0.000072, '(V*s)/rad'}; %Back-emf constant
end
variables
torque = {0, 'N*m'}; %Total Torque
tau = {0, 'N*m'}; %Electric Torque
w = {0, 'rad/s'}; %Angular Velocity
I = {0, 'A'}; %Current
V = {0, 'V'}; %Applied voltage
Vb = {0, 'V'}; %Counter electromotive force
end
branches
torque : r.t -> c.t; % Through variable tau from r to c
I : p.i -> n.i; % Through variable i from p to n
end
equations
assert(R>0);
w == r.w -c.w; % Across variable w from r to c
V == p.v -n.v; % Across variable v from p to n
torque+J*w.der == tau-Dr*w;
tau == Ki*I;
L*I.der+R*I == V-Vb;
Vb == Kb*w;
end
end
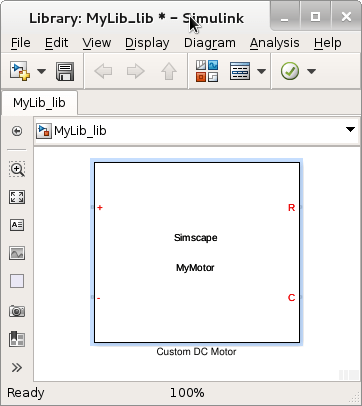
Build a Simscape library from the generated component.
if ~isfolder('+MyLib') mkdir +MyLib; end copyfile MyMotor.ssc +MyLib; sscbuild MyLib;
Generating Simulink library 'MyLib_lib' in the current directory '/tmp/Bdoc26a_3233028_1469913/tp1b00ed76/symbolic-ex98670381' ... Product info can only be assigned for libraries under matlab/toolbox folder.
See Also
Functions
diff|subs|solve|matlabFunction|ode45|symReadSSCParameters|symReadSSCVariables|symWriteSSC