daeFunction
Convert system of differential algebraic equations to MATLAB function handle suitable for ode15i
Description
f = daeFunction(___,Name=Value)Name=Value
arguments.
Examples
Create the system of differential algebraic equations. Here, the symbolic functions x1(t) and x2(t) represent the state variables of the system. The system also contains constant symbolic parameters a, b, and the parameter function r(t). These parameters do not represent state variables. Specify the equations and state variables as two symbolic vectors: equations as a vector of symbolic equations, and variables as a vector of symbolic function calls.
syms x1(t) x2(t) a b r(t) eqs = [diff(x1(t),t) == a*x1(t) + b*x2(t)^2,... x1(t)^2 + x2(t)^2 == r(t)^2]; vars = [x1(t),x2(t)];
Use daeFunction to generate a MATLAB® function handle f depending on the variables x1(t), x2(t) and on the parameters a, b, r(t).
f = daeFunction(eqs,vars,a,b,r(t))
f = function_handle with value:
@(t,in2,in3,param1,param2,param3)[in3(1,:)-param1.*in2(1,:)-param2.*in2(2,:).^2;-param3.^2+in2(1,:).^2+in2(2,:).^2]
Specify the parameter values, and create the reduced function handle F as follows.
aVal = -0.6; bVal = -0.1; rFunc = @(t) cos(t)/(1 + t^2); F = @(t,Y,YP) f(t,Y,YP,aVal,bVal,rFunc(t));
Specify consistent initial conditions for the DAE system.
t0 = 0; y0 = [-rFunc(t0)*sin(0.1); rFunc(t0)*cos(0.1)]; yp0 = [aVal*y0(1) + bVal*y0(2)^2; 1.234];
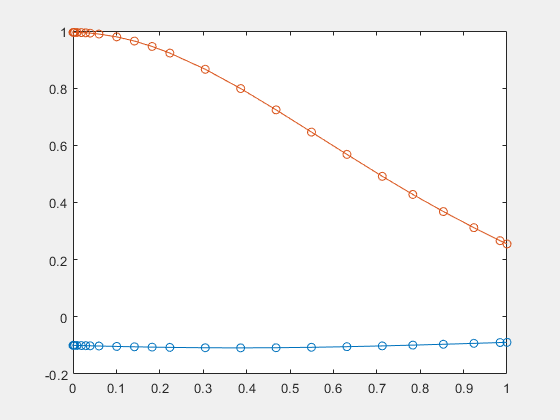
Now, use ode15i to solve the system of equations.
ode15i(F,[t0,1],y0,yp0)
Write the generated function handle to a file by specifying
the File option. When writing to a file,
daeFunction optimizes the code using intermediate
variables named t0, t1, .… Include
comments in the file using the Comments option.
Write the generated function handle to the file
myfile.
syms x1(t) x2(t) a b r(t)
eqs = [diff(x1(t),t) == a*x1(t) + b*x2(t)^2,...
x1(t)^2 + x2(t)^2 == r(t)^2];
vars = [x1(t),x2(t)];
daeFunction(eqs,vars,a,b,r(t),File="myfile")function eqs = myfile(t,in2,in3,param1,param2,param3) %MYFILE % EQS = MYFILE(T,IN2,IN3,PARAM1,PARAM2,PARAM3) % This function was generated by the Symbolic Math Toolbox version 7.3. % 01-Jan-2017 00:00:00 YP1 = in3(1,:); x1 = in2(1,:); x2 = in2(2,:); t2 = x2.^2; eqs = [YP1-param2.*t2-param1.*x1;t2-param3.^2+x1.^2];
Include the comment Version: 1.1.
daeFunction(eqs,vars,a,b,r(t),File="myfile", ...
Comments="Version: 1.1");function eqs = myfile(t,in2,in3,param4,param5,param6) ... %Version: 1.1 YP3 = in3(1,:); ...
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2014b