3-D Vision
3-D vision helps you understand and reconstruct the three-dimensional structure of the world using visual data. With Computer Vision Toolbox™, you can estimate camera poses using epipolar geometry, triangulate 3-D points from multiple views, and refine results through bundle adjustment. The toolbox also supports stereo vision workflows, including stereo camera calibration, image rectification, disparity map computation, and dense 3-D reconstruction. It also provides tools to manage image and point data, build pose graphs, and visualize spatial relationships for accurate 3-D scene reconstruction using multi-view geometry.
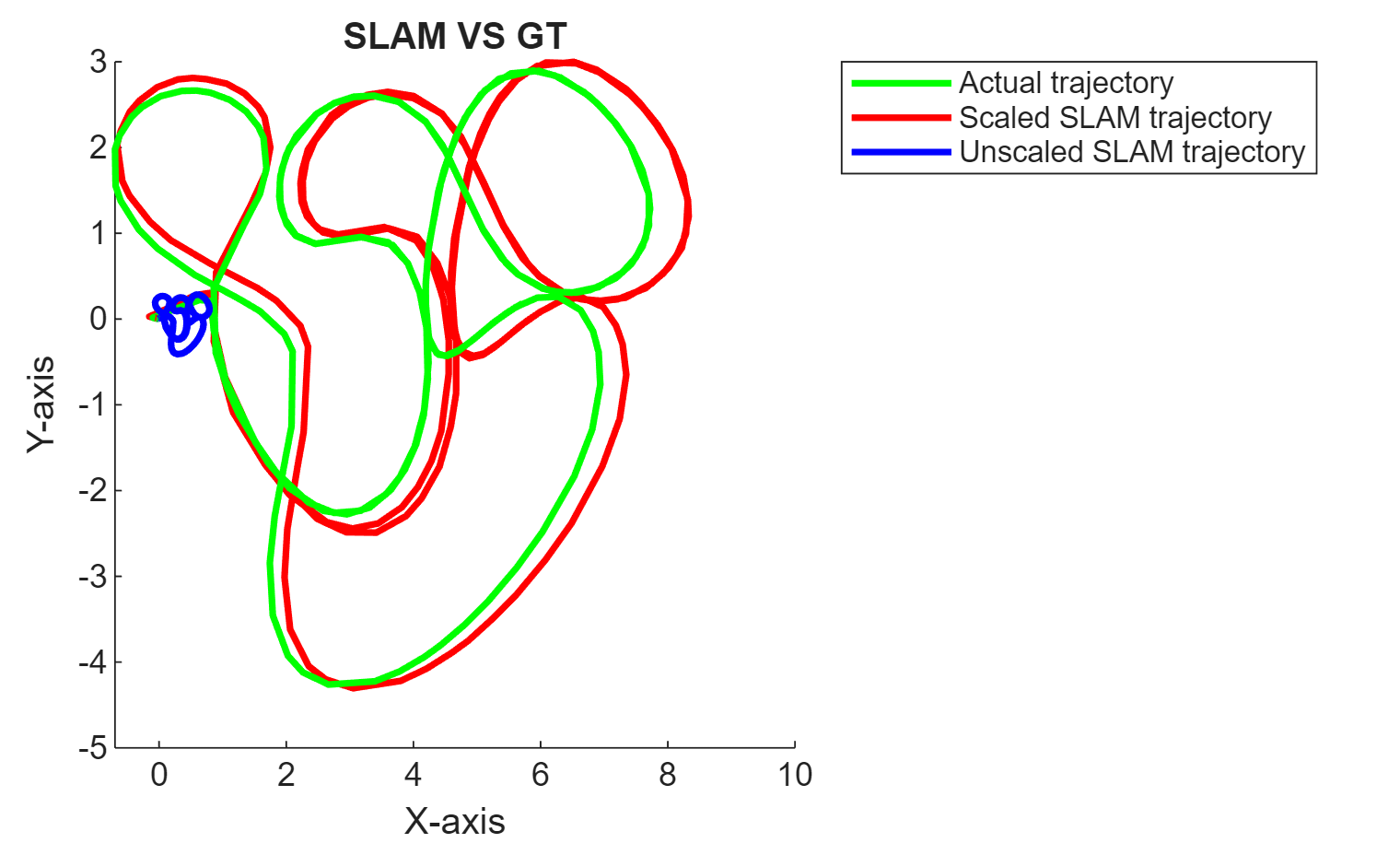
You can use visual SLAM to simultaneously localize a camera and build a map of its surroundings, in real time from monocular, stereo, or RGB-D camera inputs. The toolbox supports inertial sensor fusion with visual SLAM to improve localization accuracy. You can visualize and evaluate accuracy of trajectories, and deploy visual SLAM using code generation.
The toolbox also provides a comprehensive structure from motion (SfM) pipeline, which helps you reconstruct 3-D scenes from multiple 2-D images taken from different viewpoints. You can detect and match features, estimate camera poses, triangulate points, and refine results using bundle adjustment. You can also apply Neural Radiance Fields (NeRF) for dense reconstruction and novel view synthesis.
Lastly, you can also process 3-D point clouds to support mapping, localization, and object modeling. You can preprocess, visualize, register, and fit geometric shapes to point cloud data. The toolbox supports building maps and implementing SLAM algorithms using 3-D point clouds.
Categories
- Camera Pose Estimation and 3-D Reconstruction
Estimate camera poses using foundational epipolar geometry, triangulation and bundle adjustment for 3-D reconstruction
- Stereo Vision
Stereo camera calibration, rectification, disparity estimation, and dense 3-D reconstruction
- Visual SLAM
Real-time visual localization and mapping (vSLAM) with monocular, RGB-D, or stereo cameras and inertial sensor fusion with deployment support
- Structure from Motion
Reconstruct 3-D scene structure from multiple views using incremental structure from motion and NeRF
- Process Point Clouds
Preprocess, visualize, register, fit geometrical shapes, build maps, implement SLAM algorithms, and use deep learning with 3-D point clouds
Featured Examples

Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.
Performant Monocular Visual-Inertial SLAM
Use visual inputs from a camera and positional data from an IMU to perform viSLAM in real time.

Structure from Motion from Multiple Views
Estimate 3-D structure of a scene from a set of 2-D views using incremental structure from motion.
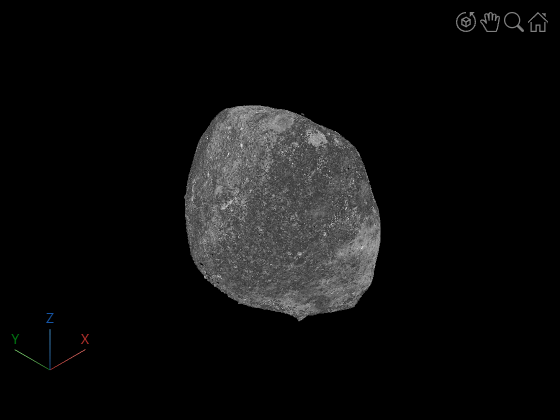
Dense 3-D Reconstruction of Asteroid Surface from Image Sequence
Reconstruct dense 3-D point cloud and continuous surface mesh for an asteroid using 2-D images.

Augmented Reality Using AprilTag Markers
Use marker-based augmented reality to render virtual content into a scene.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement and generate C ++ code for a vSLAM algorithm that estimates poses for the TUM RGB-D Benchmark and deploy as an ROS node to a remote device.

Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.

Depth Estimation from Stereo Video
Detect people in video taken with a calibrated stereo camera and determine distance from the camera.

Uncalibrated Stereo Image Rectification
Compute rectification of two uncalibrated images.

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data obtained from the Unreal Engine® simulation environment.

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Perform monocular visual-inertial odometry using tightly coupled factor graph optimization.
Reconstruct 3-D Scenes and Synthesize Novel Views Using Neural Radiance Field Model
Reconstruct 3-D scenes and synthesize novel views from a set of 2-D images using the Nerfacto Neural Radiance Field (NeRF) model.