Resultados de
In honor of National Pet Day on April 11th, we're excited to announce a fun contest that combines two of our favorite things: our beloved pets and our passion for MATLAB/Simulink! Whether you're a cat enthusiast, a dog lover, or a companion to any other pet, we invite you to join in the fun and showcase your creativity.
How to Participate:
- Take a photo of your pet featuring any element of MATLAB/Simulink.
- Post it in the Fun channel of the Discussions area.
- Include a brief description or story behind the photo - we love to hear about your pets and your creative process!
🏆 Prizes:
We will be selecting 3 winners for this contest, and each winner will receive a MathWorks T-shirt or hat! Winners will be chosen based on creativity, originality, and how well they incorporate the MATLAB/Simulink element into their photo.
📅Important Dates:
Contest ends on April 12th, 2024, at 11:59:59 pm, Eastern Time
We can't wait to see all of your adorable and creative pet photos. Let's celebrate National Pet Day in true MathWorks style. Good luck, and most importantly, have fun!


What's the weather like in your place?
Hi guys
This is regarding my shared ThingSpeak channel. Previously it was showing the widgets side by side but in recent days it's showing widget under widget.
Why is that? Please help. 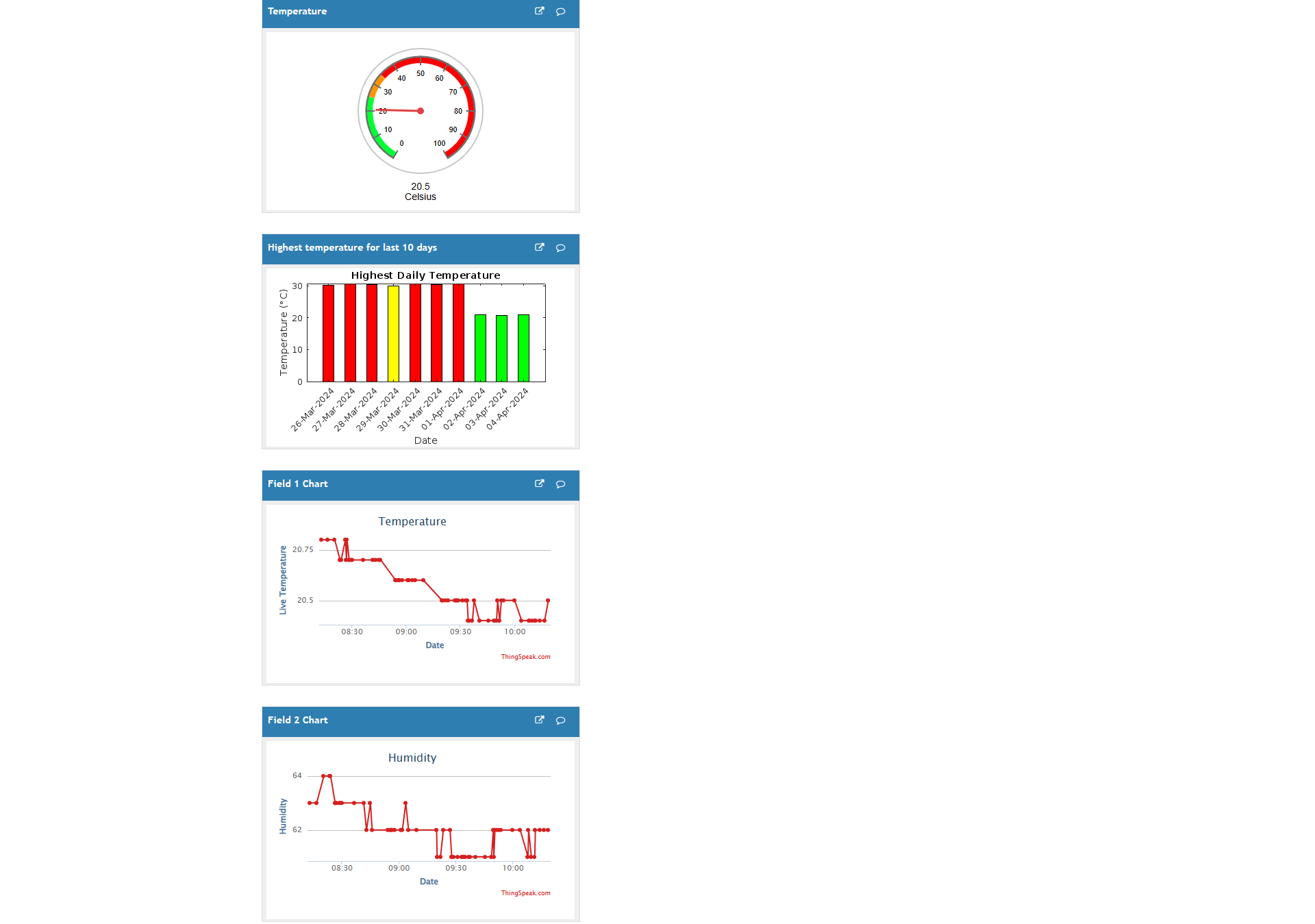
#include <WiFiS3.h>
#define LDR_PIN A0 // LDR sensor pin
#define WIFI_SSID "Nahi Chalega"
#define WIFI_PASSWORD "12234556889"
#define THINGSPEAK_HOST "api.thingspeak.com"
#define THINGSPEAK_API_KEY "xxxxxxxxxxxxxxxx" // Replace YOUR_API_KEY with your ThingSpeak Write API key
#define CHANNEL_ID "2498369" // Replace YOUR_CHANNEL_ID with your ThingSpeak channel ID
WiFiSSLClient client;
void setup() {
Serial.begin(9600);
connectWiFi();
}
void loop() {
int ldrValue = analogRead(LDR_PIN); // Read LDR sensor value
Serial.print("LDR Sensor Value: ");
Serial.println(ldrValue);
sendToThingSpeak(ldrValue);
delay(2000); // Send data every 20 seconds
}
void connectWiFi() {
Serial.println("Connecting to WiFi");
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("\nConnected to WiFi");
}
void sendToThingSpeak(int value) {
if (client.connect(THINGSPEAK_HOST, 80)) {
String data = "field1=" + String(value);
String request = "POST /update HTTP/1.1\nHost: " + String(THINGSPEAK_HOST) + "\nConnection: close\nX-THINGSPEAKAPIKEY: " + String(THINGSPEAK_API_KEY) + "\nContent-Type: application/x-www-form-urlencoded\nContent-Length: " + String(data.length()) + "\n\n" + data;
client.print(request);
Serial.println("Data sent to ThingSpeak!");
} else {
Serial.println("Failed to connect to ThingSpeak!");
}
client.stop();
}
I'm excited to share some valuable resources that I've found to be incredibly helpful for anyone looking to enhance their MATLAB skills. Whether you're just starting out, studying as a student, or are a seasoned professional, these guides and books offer a wealth of information to aid in your learning journey.
These materials are freely available and can be a great addition to your learning resources. They cover a wide range of topics and are designed to help users at all levels to improve their proficiency in MATLAB.
Happy learning and I hope you find these resources as useful as I have!
I found this link posted on Reddit.
https://workhunty.com/job-blog/where-is-the-best-place-to-be-a-programmer/Matlab/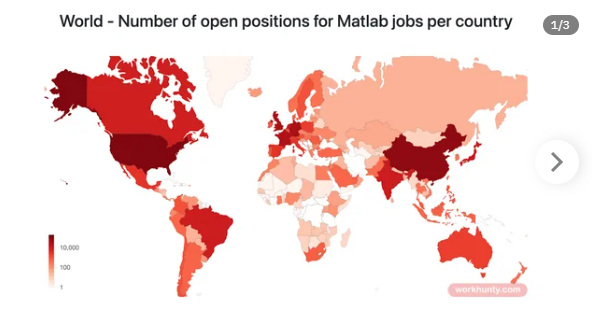
Hello Everyone,
I have modelled a FOC using average converter, and the PWM signal is generated using PWM generator (3-phase, 2-level). First, it had error of algebraic loop, but after searching in MATLAB community, I have used unit delay to avoid loop, but still when use local solver option is uncheked in the solver configuration, it still shows algerbaic loop, but when local solver is checked, it works. So, kindly put some light on this issue.
Rught now, the second issue which Im currently facing is " Index expression out of bounds. Attempted to access element 2. The valid range is 1-1." and "Function call failed.
Function 'PWM Generator (Three-phase, Two-level)/Switching Time Calculation' (#59.72.154), line 3, column 1:
"[TgabcON,TgabcOFF,ModWave] = ee.control.pwmSwitchingTimeTwoLevel(Vabc,vdc,fsw,PW"
Launch diagnostic "
I have attached the simulink model hereby. Kindly looking for your expert opinion on how to solve these issues.
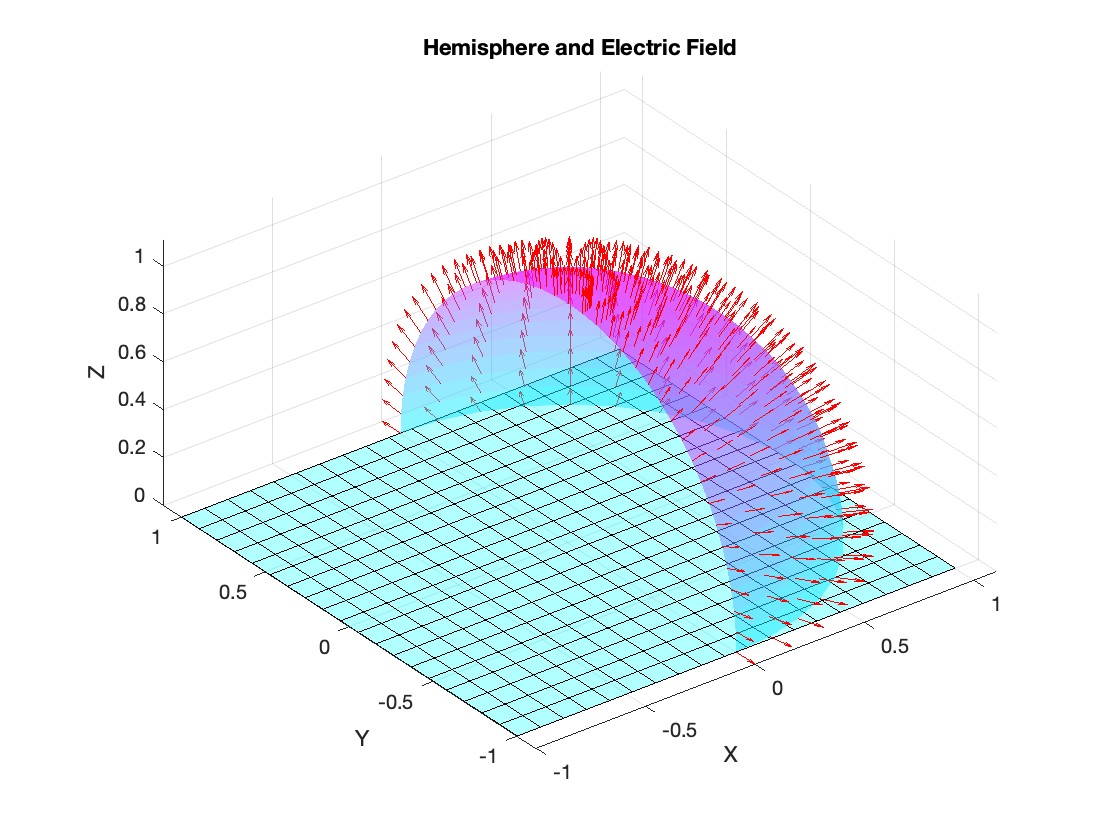
Let S be the closed surface composed of the hemisphere  and the base
and the base  Let
Let  be the electric field defined by
be the electric field defined by  . Find the electric flux through S. (Hint: Divide S into two parts and calculate
. Find the electric flux through S. (Hint: Divide S into two parts and calculate  ).
).
% Define the limits of integration for the hemisphere S1
theta_lim = [-pi/2, pi/2];
phi_lim = [0, pi/2];
% Perform the double integration over the spherical surface of the hemisphere S1
% Define the electric flux function for the hemisphere S1
flux_function_S1 = @(theta, phi) 2 * sin(phi);
electric_flux_S1 = integral2(flux_function_S1, theta_lim(1), theta_lim(2), phi_lim(1), phi_lim(2));
% For the base of the hemisphere S2, the electric flux is 0 since the electric
% field has no z-component at the base
electric_flux_S2 = 0;
% Calculate the total electric flux through the closed surface S
total_electric_flux = electric_flux_S1 + electric_flux_S2;
% Display the flux calculations
disp(['Electric flux through the hemisphere S1: ', num2str(electric_flux_S1)]);
disp(['Electric flux through the base of the hemisphere S2: ', num2str(electric_flux_S2)]);
disp(['Total electric flux through the closed surface S: ', num2str(total_electric_flux)]);
% Parameters for the plot
radius = 1; % Radius of the hemisphere
% Create a meshgrid for theta and phi for the plot
[theta, phi] = meshgrid(linspace(theta_lim(1), theta_lim(2), 20), linspace(phi_lim(1), phi_lim(2), 20));
% Calculate Cartesian coordinates for the points on the hemisphere
x = radius * sin(phi) .* cos(theta);
y = radius * sin(phi) .* sin(theta);
z = radius * cos(phi);
% Define the electric field components
Ex = 2 * x;
Ey = 2 * y;
Ez = 2 * z;
% Plot the hemisphere
figure;
surf(x, y, z, 'FaceAlpha', 0.5, 'EdgeColor', 'none');
hold on;
% Plot the electric field vectors
quiver3(x, y, z, Ex, Ey, Ez, 'r');
% Plot the base of the hemisphere
[x_base, y_base] = meshgrid(linspace(-radius, radius, 20), linspace(-radius, radius, 20));
z_base = zeros(size(x_base));
surf(x_base, y_base, z_base, 'FaceColor', 'cyan', 'FaceAlpha', 0.3);
% Additional plot settings
colormap('cool');
axis equal;
grid on;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('Hemisphere and Electric Field');
I feel like no one at UC San Diego knows this page, let alone this server, is still live. For the younger generation, this is what the whole internet used to look like :)
isempty( [ ] )
10%
isempty( { } )
13%
isempty( '' ) % 2 single quotes
13%
isempty( "" ) % 2 double quotes
24%
c = categorical( [ ] ); isempty(c)
18%
s = struct("a", [ ] ); isempty(s.a)
22%
1324 votos
Looking for 10 candidates for a closed beta on new MATLAB live script features.
Do you use live scripts regularly in MATLAB? Do you collaborate with others using live scripts?
MathWorks is looking for 10 candidates for a closed beta on new features for live scripts. Help us develop exciting new features with your feedback.
If you are selected, you will receive an email invitation to sign an NDA
I will post here when the quota is filled

The image was created with DALL-E 3.
%%
clear
clc
close all
% TODO - Replace the [] with channel ID to write data to:
writeChannelID = 'your channel ID'; %channel ID
% TODO - Enter the Write API Key between the '' below:
writeAPIKey = 'your write API Key'; %write API Key
% url for POST request
url = 'https://aemo.com.au/';
webText = webread(url);
filteredData(4) = urlfilter(url,'<div class="summary-row-value">');
display(filteredData(4), 'AEMO');
thingSpeakWrite(writeChannelID, filteredData(4), 'WriteKey', writeAPIKey);
Hello, brilliant minds of our engineering community!
We hope this message finds you in the midst of an exciting project or, perhaps, deep in the realms of a challenging problem, because we've got some groundbreaking news that might just make your day a whole lot more interesting.
🎉 Introducing PreAnswer AI - The Future of Community Support! 🎉
Have you ever found yourself pondering over a complex problem, wishing for an answer to magically appear before you even finish formulating the question? Well, wish no more! The MathWorks team, in collaboration with the most imaginative minds from the realms of science fiction, is thrilled to announce the launch of PreAnswer AI, an unprecedented feature set to revolutionize the way we interact within our MATLAB and Simulink community.
What is PreAnswer AI?
PreAnswer AI is our latest AI-driven initiative designed to answer your questions before you even ask them. Yes, you read that right! Through a combination of predictive analytics, machine learning, and a pinch of engineering wizardry, PreAnswer AI anticipates the challenges you're facing and provides you with solutions, insights, and code snippets in real-time.
How Does It Work?
- Presentiment Algorithms: By simply logging into MATLAB Central, our AI begins to analyze your recent coding patterns, activity, and even the intensity of your keyboard strokes to understand your current state of mind.
- Predictive Insights: Using a complex algorithm, affectionately dubbed "The Oracle", PreAnswer AI predicts the questions you're likely to ask and compiles comprehensive answers from our vast database of resources.
- Efficiency and Speed: Imagine the time saved when the answers to your questions are already waiting for you. PreAnswer AI ensures you spend more time innovating and less time searching for solutions.
We are on the cusp of deploying PreAnswer AI in a beta phase and are eager for you to be among the first to experience its benefits. Your feedback will be invaluable as we refine this feature to better suit our community's needs.
---------------------------------------------------------------
Spoiler, it's April 1st if you hadn't noticed. While we might not (yet) have the technology to read minds or predict the future, we do have an incredible community filled with knowledgeable, supportive members ready to tackle any question you throw their way.
Let's continue to collaborate, innovate, and solve complex problems together, proving that while AI can do many things, the power of a united community of brilliant minds is truly unmatched.
Thank you for being such a fantastic part of our community. Here's to many more questions, answers, and shared laughs along the way.
Happy April Fools' Day!
The cloks have changed in the UK having gone forward 1 hour but the times on the thingspeak graphs are out an hour - what is the solution please
More than 500,000 people have subscribed to the MATLAB channel. MathWorks would like to thank everyone who has taken the time to watch one of our videos, leave us a comment, or share our videos with others. Together we’re accelerating the pace of engineering and science.
Although, I think I will only get to see a partial eclipse (April 8th!) from where I am at in the U.S. I will always have MATLAB to make my own solar eclipse. Just as good as the real thing.
Code (found on the @MATLAB instagram)
a=716;
v=255;
X=linspace(-10,10,a);
[~,r]=cart2pol(X,X');
colormap(gray.*[1 .78 .3]);
[t,g]=cart2pol(X+2.6,X'+1.4);
image(rescale(-1*(2*sin(t*10)+60*g.^.2),0,v))
hold on
h=exp(-(r-3)).*abs(ifft2(r.^-1.8.*cos(7*rand(a))));
h(r<3)=0;
image(v*ones(a),'AlphaData',rescale(h,0,1))
camva(3.8)

I keep getting this error, what do I do?
Error: File: convert_mnist_to_mat.m Line: 63 Column: 1
This statement is not inside any function.
(It follows the END that terminates the definition of the function
"read_mnist_labels".)
function convert_mnist_to_mat(mnist_dir, output_file)
% Function to convert MNIST dataset files into .mat format
% Check if the directory exists
if ~isfolder(mnist_dir)
error('MNIST directory does not exist.');
end
% Read training images
train_images = read_mnist_images(fullfile(mnist_dir, 'train-images-idx3-ubyte'));
% Read training labels
train_labels = read_mnist_labels(fullfile(mnist_dir, 'train-labels-idx1-ubyte'));
% Read test images
test_images = read_mnist_images(fullfile(mnist_dir, 't10k-images-idx3-ubyte'));
% Read test labels
test_labels = read_mnist_labels(fullfile(mnist_dir, 't10k-labels-idx1-ubyte'));
% Save data into .mat file
save(output_file, 'train_images', 'train_labels', 'test_images', 'test_labels');
disp('MNIST dataset converted successfully.');
end
function images = read_mnist_images(filename)
% Function to read MNIST image data
fid = fopen(filename, 'rb');
assert(fid ~= -1, ['Could not open ', filename, '']);
magic_number = fread(fid, 1, 'int32', 0, 'ieee-be');
assert(magic_number == 2051, ['Invalid magic number in ', filename]);
num_images = fread(fid, 1, 'int32', 0, 'ieee-be');
num_rows = fread(fid, 1, 'int32', 0, 'ieee-be');
num_cols = fread(fid, 1, 'int32', 0, 'ieee-be');
images = fread(fid, [num_rows, num_cols, num_images], 'uint8');
fclose(fid);
images = permute(images, [2, 1, 3]); % Convert from (rows, cols, images) to (cols, rows, images)
end
function labels = read_mnist_labels(filename)
% Function to read MNIST label data
fid = fopen(filename, 'rb');
assert(fid ~= -1, ['Could not open ', filename, '']);
magic_number = fread(fid, 1, 'int32', 0, 'ieee-be');
assert(magic_number == 2049, ['Invalid magic number in ', filename]);
num_labels = fread(fid, 1, 'int32', 0, 'ieee-be');
labels = fread(fid, [num_labels, 1], 'uint8');
fclose(fid);
end
% Usage example:
mnist_dir = 'C:\Users\gabep\Desktop\MNIST';
output_file = 'mnist_dataset.mat';
convert_mnist_to_mat(mnist_dir, output_file);
One of the privileges of working at MathWorks is that I get to hang out with some really amazing people. Steve Eddins, of ‘Steve on Image Processing’ fame is one of those people. He recently announced his retirement and before his final day, I got the chance to interview him. See what he had to say over at The MATLAB Blog The Steve Eddins Interview: 30 years of MathWorking
Hi everyone, I need help for transfering the data from a ThingSpeak' channel to Google Sheets. Please help me.
Hello everyone.
I have modelled a three phase inverter to run a 5Kw PMSM motor (MATLAB preparametrized). The torque load is applied through ideal torque source and step junction, and the speed of the motor is visualized. When I provide the gate signal only through SPWM generator (No control, only SPWM signal generation through carrier and sine wave comparison),
- The speed stabilizes around 62 rad/sec after some initial oscillations, but when I try to run the same model using PMSM field oriented control block set, the speed is negative (negative rotation) and it keeps on increasing eventhough the speed reference provided is only upto 60. The waveform of both speed and torque has been attached hereby.
- Moreover, is there anyway to tune the PI controllers (inner and outer loops) of PMSM Field oriented blockset automatically.
- It can be seen from the torque waveform, there is soemkind of disturbance around 0.4-0.45 sec, which creates too much noise in current, torque waveforms. What could be the reason behind this.
Your help would be highly appreciated.
Thank you.