Creación de modelos en tiempo discreto
Este ejemplo muestra cómo crear modelos lineales en tiempo discreto utilizando los comandos tf, zpk, ss y frd.
Especificación de modelos en tiempo discreto
Control System Toolbox™ permite crear tanto modelos en tiempo continuo como en tiempo discreto. La sintaxis para crear modelos en tiempo discreto es parecida a la de los modelos en tiempo continuo, con la diferencia de que también se debe proporcionar un tiempo de muestreo (intervalo de muestreo en segundos).
Por ejemplo, para especificar la función de transferencia en tiempo discreto:
con el periodo de muestreo Ts = 0.1 s, introduzca:
num = [ 1 -1 ]; den = [ 1 -1.85 0.9 ]; H = tf(num,den,0.1)
H =
z - 1
------------------
z^2 - 1.85 z + 0.9
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
o, de manera equivalente:
z = tf('z',0.1);
H = (z - 1) / (z^2 - 1.85*z + 0.9);De manera similar, para especificar el modelo en espacio de estados en tiempo discreto:
con el periodo de muestreo Ts = 0.1 s, introduzca:
sys = ss(.5,1,.2,0,0.1);
Reconocimiento de sistemas en tiempo discreto
Hay varias maneras de comprobar si su modelo LTI es discreto:
La pantalla muestra un valor de tiempo de muestreo distinto de cero
sys.Tsoget(sys,'Ts')devuelven un valor de tiempo de muestreo distinto de cero.isdt(sys)devuelve un valor verdadero.
Por ejemplo, para la función de transferencia H especificada anteriormente,
H.Ts
ans = 0.1000
isdt(H)
ans = logical
1
También se pueden detectar los sistemas en tiempo discreto buscando las siguientes cualidades:
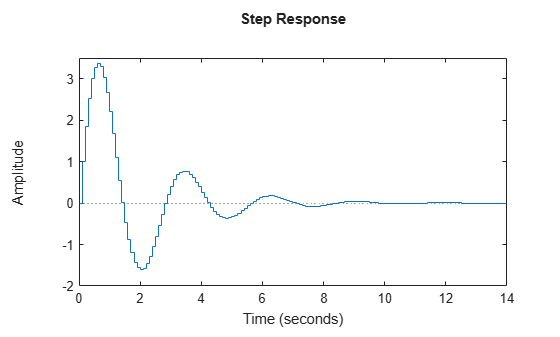
Gráficas de respuesta en el tiempo: la curva de respuesta tiene un aspecto escalonado debido a la naturaleza de sus datos de muestreo.
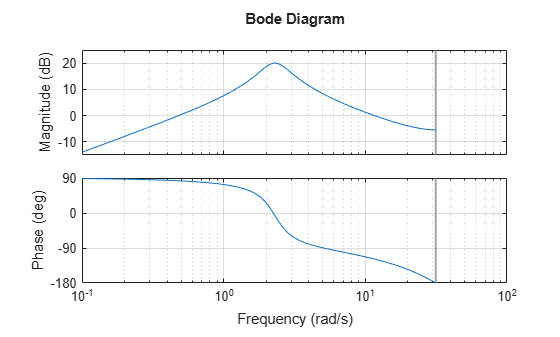
Diagramas de Bode: hay una barra vertical que marca la frecuencia de Nyquist (pi dividido por el tiempo de muestreo).
Las siguientes gráficas muestran estas características:
step(H)
bode(H), grid