driving.scenario.bicycleMesh
Mesh representation of bicycle in driving scenario
Description
vehicleMesh = driving.scenario.bicycleMeshextendedObjectMesh object,
mesh.
Examples
Add a prebuilt bicycle mesh to a driving scenario. Then, use a lidarPointCloudGenerator System object™ to generate a point cloud of the bicycle mesh.
Create and show the prebuilt bicycle mesh.
mesh = driving.scenario.bicycleMesh; egoMesh = driving.scenario.carMesh; figure show(mesh)
ans =
Axes with properties:
XLim: [-0.5000 0.5000]
YLim: [-0.2000 0.2000]
XScale: 'linear'
YScale: 'linear'
GridLineStyle: '-'
Position: [0.1300 0.1100 0.7750 0.8150]
Units: 'normalized'
Show all properties
Create a driving scenario.
s = drivingScenario;
Add a straight road to the driving scenario. The road has one lane traveling in each direction.
road(s,[0 0 0; 30 0 0],'Lanes',lanespec([1 1]));Add a car as an ego vehicle and a bicycle as a non-ego actor.
egoVehicle = vehicle(s,'ClassID',1,'Mesh',egoMesh); bicycle = vehicle(s,'Position',[15 2 0],'Yaw',180,'ClassID',3,'Mesh',mesh); smoothTrajectory(egoVehicle,[1 -2 0; 21.3 -2 0],20);
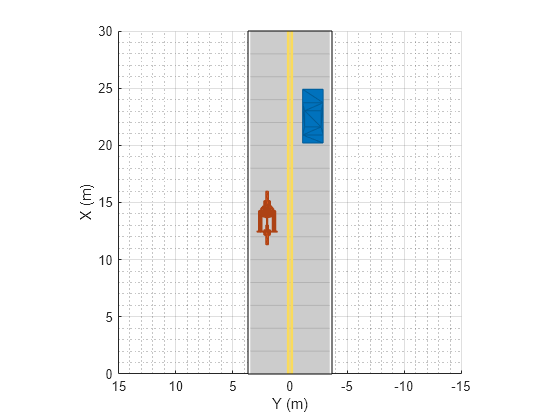
Plot the driving scenario. Set name-value pair 'Meshes','on' to show the meshes of the actors in the plot.
figure; plot(s,'Meshes','on');
Create a lidarPointCloudGenerator System object. Set the actor profiles of the System object to those in the driving scenario.
lidar = lidarPointCloudGenerator; lidar.ActorProfiles = actorProfiles(s);
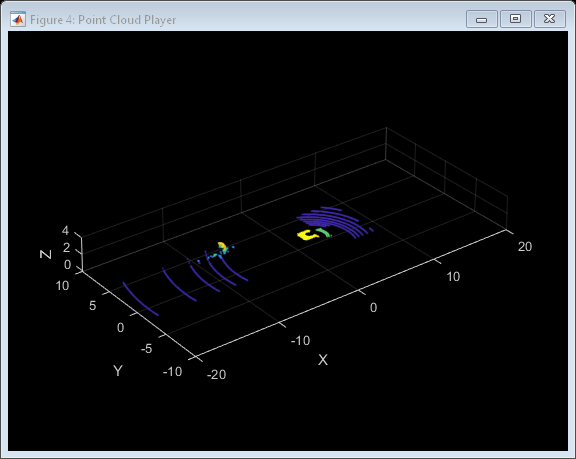
Generate a lidar point cloud of the driving scenario.
player = pcplayer([-20 20],[-10 10],[0 4]); while advance(s) tgts = targetPoses(egoVehicle); rdmesh = roadMesh(egoVehicle); [ptCloud,isValidTime] = lidar(tgts,rdmesh,s.SimulationTime); if isValidTime view(player,ptCloud); end end
Output Arguments
Version History
Introduced in R2020a