smoothPathSpline
Smooth vehicle path using cubic spline interpolation
Syntax
Description
[
generates a smooth vehicle path, consisting of poses,directions] = smoothPathSpline(refPoses,refDirections,numSmoothPoses)numSmoothPoses
discretized poses, by fitting the input reference path poses to a cubic spline. Given the
input reference path directions, smoothPathSpline also returns the
directions that correspond to each pose.
Use this function to convert a C1-continuous vehicle path to
a C2-continuous path. C1-continuous
paths include the driving.DubinsPathSegment or driving.ReedsSheppPathSegment paths that you can plan using a pathPlannerRRT
object. For more details on these path types, see C1-Continuous and C2-Continuous Paths.
You can use the returned poses and directions with a vehicle controller, such as the
lateralControllerStanley function.
[
specifies a minimum separation threshold between poses. If the distance between two poses is
smaller than poses,directions] = smoothPathSpline(refPoses,refDirections,numSmoothPoses,minSeparation)minSeparation, the function uses only one of the poses for
interpolation.
[___,
also returns the cumulative path length and signed path curvature at each returned pose,
using any of the previous syntaxes. Use these values to generate a velocity profile along
the path. cumLengths,curvatures] = smoothPathSpline(___)
Examples
Smooth a path that was planned by an RRT* path planner.
Load and plot a costmap of a parking lot.
data = load('parkingLotCostmap.mat');
costmap = data.parkingLotCostmap;
plot(costmap)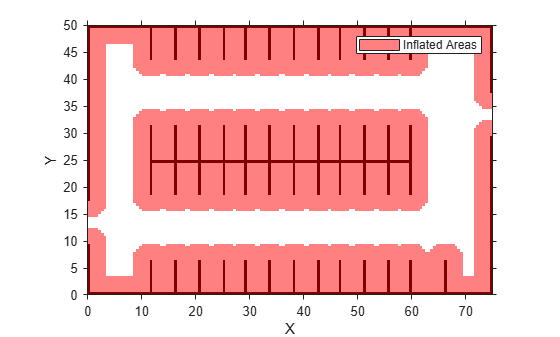
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation angles are in degrees.
startPose = [4,4,90]; % [meters, meters, degrees]
goalPose = [30,13,0];Use a pathPlannerRRT object to plan a path from the start pose to the goal pose.
planner = pathPlannerRRT(costmap); refPath = plan(planner,startPose,goalPose);
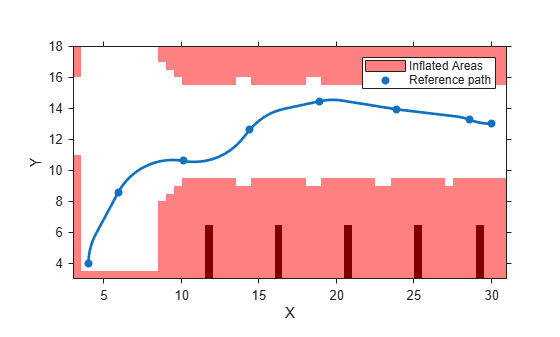
Plot and zoom in on the planned path. The path is composed of a sequence of Dubins curves. These curves include abrupt changes in curvature that are not suitable for driving with passengers.
hold on plot(refPath,'Vehicle','off','DisplayName','Reference path') xlim([3 31]) ylim([3 18])
Interpolate the transition poses of the path. Use these poses as the reference poses for interpolating the smooth path. Also return the motion directions at each pose.
[refPoses,refDirections] = interpolate(refPath);
Specify the number of poses to return in the smooth path. Return poses spaced about 0.1 meters apart, along the entire length of the path.
approxSeparation = 0.1; % meters
numSmoothPoses = round(refPath.Length / approxSeparation);Generate the smooth path by fitting a cubic spline to the reference poses. smoothPathSpline returns the specified number of discretized poses along the smooth path.
[poses,directions] = smoothPathSpline(refPoses,refDirections,numSmoothPoses);
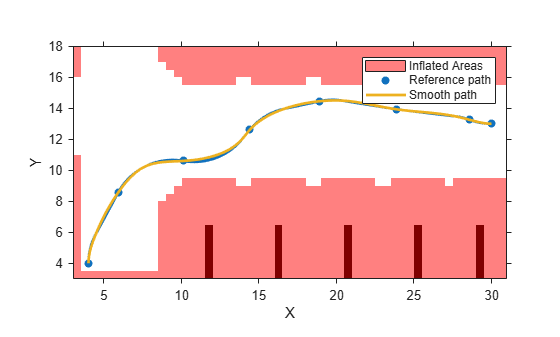
Plot the smooth path. The more abrupt changes in curvature that were present in the reference path are now smoothed out.
plot(poses(:,1),poses(:,2),'LineWidth',2,'DisplayName','Smooth path') hold off
Input Arguments
Output Arguments
More About
A path is C1-continuous if its derivative exists and is continuous. Paths that are only C1-continuous have discontinuities in their curvature. For example, a path composed of Dubins or Reeds-Shepp path segments has discontinuities in curvature at the points where the segments join. These discontinuities result in changes in direction that are not smooth enough for driving with passengers.
A path is also C2-continuous if its second derivative exists and is continuous. C2-continuous paths have continuous curvature and are smooth enough for driving with passengers.
Tips
To check if a smooth path is collision-free, specify the smooth poses as an input to the
checkPathValidityfunction.
Algorithms
The path-smoothing algorithm interpolates a parametric cubic spline that passes through all input reference pose points. The parameter of the spline is the cumulative chord length at these points. [1]
The tangent direction of the smoothed output path approximately matches the orientation angle of the vehicle at the starting and goal poses.
References
[1] Floater, Michael S. "On the Deviation of a Parametric Cubic Spline Interpolant from Its Data Polygon." Computer Aided Geometric Design. Vol. 25, Number 3, 2008, pp. 148–156.
[2] Lepetic, Marko, Gregor Klancar, Igor Skrjanc, Drago Matko, and Bostjan Potocnik. "Time Optimal Path Planning Considering Acceleration Limits." Robotics and Autonomous Systems. Vol. 45, Numbers 3–4, 2003, pp. 199–210.
Extended Capabilities
Version History
Introduced in R2019a