hdlcoder.TimingGenerator Class
Namespace: hdlcoder
Base class to implement custom tool and device support for critical path estimation reporting
Since R2024a
Description
The hdlcoder.TimingGenerator class is an abstract base class you
can use to implement custom tool and device support for critical path estimation
reporting. You can use instances of this class as the input to the
genhdltdb function.
Because the hdlcoder.TimingGenerator class is an abstract class,
you cannot create an instance of this class directly. You use the
handle class to derive other classes, which can be concrete
classes whose instances are handle objects.
To define a handle class, derive your class from
hdlcoder.TimingGenerator using the syntax in this classdef code.
classdef MyHandleClass < hdlcoder.TimingGenerator
...
endWhen you create a derived class object from
hdlcoder.TimingGenerator, HDL Coder™ generates a comma-separated file called
timing_info.txt. The file contains timing details related to the
operation undergoing a timing analysis.
The hdlcoder.TimingGenerator class is a handle class.
Class Attributes
Abstract | true |
HandleCompatible | true |
For information on class attributes, see Class Attributes.
Events
| Event Name | Trigger | Event Data | Event Attributes |
|---|---|---|---|
ObjectBeingDestroyed | Triggered when the handle object is about to be destroyed, but before
calling the delete method. | event.EventData |
|
Examples
More About
The output of the derived hdlcoder.TimingGenerator class is a CSV
file named timing_info.txt. The file contains information in this
format:DelayInfo, source_type, destination_type, propagation delay
(ns).
The source_type or destination_type fields
are of type:
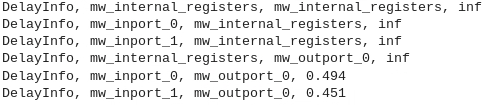
mw_internal_registers— Any internal register inside the subsystem that contains the block to be characterized.mw_inport_#— Numbered input to the operator starting at index zero. For example,mw_inport_0,mw_inport_1, and so on.mw_outport_#— Numbered output from the operator starting at index zero. For example,mw_outport_0,mw_outport_1, and so on.
The propagation delay (ns) field is the value in nanoseconds
for either internal-to-internal, input-to-internal, internal-to-output, or
input-to-output propagation delays. If a timing path does not exist , this value is
inf. This field contains the timing information for every
path. This image shows the contents of an example timing_info.txt
file:
Version History
Introduced in R2024a