Fixed-Displacement Pump (IL)
Fixed-displacement pump in isothermal liquid system

Libraries:
Simscape /
Fluids /
Isothermal Liquid /
Pumps & Motors
Description
The Fixed-Displacement Pump (IL) block models a pump with constant-volume displacement. The fluid may move from port A to port B, called forward mode, or from port B to port A, called reverse mode. Pump mode operation occurs when there is a pressure gain in the direction of the flow. Motor mode operation occurs when there is a pressure drop in the direction of the flow.
Shaft rotation corresponds to the sign of the fluid volume. Positive fluid displacement corresponds to positive shaft rotation in forward mode. Negative fluid displacement corresponds to negative shaft angular velocity in forward mode.
Operation Modes

The block has four modes of operation. The working mode depends on the pressure gain from port A to port B, Δp = pB – pA and the angular velocity, ω = ωR – ωC:
Mode 1, Forward Pump: Positive shaft angular velocity causes a pressure increase from port A to port B and flow from port A to port B.
Mode 2, Reverse Motor: Flow from port B to port A causes a pressure decrease from B to A and negative shaft angular velocity.
Mode 3, Reverse Pump: Negative shaft angular velocity causes a pressure increase from port B to port A and flow from B to A.
Mode 4, Forward Motor: Flow from port A to B causes a pressure decrease from A to B and positive shaft angular velocity.
The pump block has analytical, lookup table, and physical signal parameterizations. When using tabulated data or an input signal for parameterization, you can choose to characterize pump operation based on efficiency or losses.
The threshold parameters Pressure gain threshold for pump-motor transition and Angular velocity threshold for pump-motor transition identify regions where numerically smoothed flow transition between the pump operational modes can occur. For the pressure and angular velocity thresholds, choose a transition region that provides some margin for the transition term, but which is small enough relative to the typical pump pressure gain and angular velocity so that it will not impact calculation results.
Analytical Leakage and Friction Parameterization
If you set Leakage and friction parameterization to
Analytical, the block calculates leakage and friction
from constant values of shaft velocity, pressure gain, and friction torque. The
leakage flow rate, which is correlated with the pressure differential over the pump,
is calculated as:
where:
Δp is pB – pA.
ρavg is the average fluid density.
K is the Hagen-Poiseuille coefficient for analytical loss,
where:
D is the Displacement.
ωnom is the Nominal shaft angular velocity.
ηv, nom is the Volumetric efficiency at nominal conditions.
Δpnom is the Nominal pressure gain.
The friction torque, which is related to the pump pressure differential, is calculated as:
where:
τ0 is the No-load torque.
k is the friction torque vs. pressure gain coefficient at nominal displacement, which is determined from the Mechanical efficiency at nominal conditions, ηm, nom:
τfr,nom is the friction torque at nominal conditions:
ω is the relative shaft angular velocity, or .
Tabulated Data Parameterizations
When using tabulated data for pump efficiencies or losses, you can provide data for one or more of the pump operational modes. The signs of the tabulated data determine the operational regime of the block. When data is provided for less than four operational modes, the block calculates the complementing data for the other modes by extending the given data into the remaining quadrants.
Tabulated data - volumetric and mechanical
efficiencies parameterizationThe leakage flow rate is
where:
and ηv is the volumetric efficiency, which is interpolated from the user-provided tabulated data. The transition term, α, is
where:
Δp is pB – pA.
pthreshold is the Pressure gain threshold for pump-motor transition.
ω is ωR – ωC.
ωthreshold is the Angular velocity threshold for pump-motor transition.
The friction torque is calculated as:
where:
and ηm is the mechanical efficiency, which is interpolated from the user-provided tabulated data.
Tabulated data - volumetric and mechanical
losses parameterizationThe leakage flow rate is calculated as:
where qloss is interpolated from the Volumetric loss table, q_loss(dp,w) parameter, which is based on user-supplied data for pressure drop, shaft angular velocity, and fluid volumetric displacement.
The shaft friction torque is
where τloss is interpolated from the Mechanical loss table, torque_loss(dp,w) parameter, which is based on user-supplied data for pressure drop and shaft angular velocity.
Input Signal Parameterization
When you select Input signal - volumetric and mechanical
efficiencies, ports EV and
EM are enabled. The internal leakage and shaft friction are
calculated in the same way as the Tabulated data - volumetric and
mechanical efficiencies parameterization, except that
ηv and
ηm are received directly at ports
EV and EM, respectively.
When you select Input signal - volumetric and mechanical
losses, ports LV and LM
are enabled. These ports receive leakage flow and friction torque as positive
physical signals. The leakage flow rate is calculated as:
where:
qLV is the leakage flow received at port LV.
pthresh is the Pressure gain threshold for pump-motor transition parameter.
The friction torque is calculated as:
where
τLM is the friction torque received at port LM.
ωthresh is the Angular velocity threshold for pump-motor transition parameter.
The volumetric and mechanical efficiencies range between the user-defined specified minimum and maximum values. Any values lower or higher than this range will take on the minimum and maximum specified values, respectively.
Pump Operation
The pump flow rate is:
where
The pump torque is:
where
The mechanical power delivered by the pump shaft is:
and the pump hydraulic power is:
If you would like to know if the block is operating beyond the
supplied tabulated data, you can set Check if operating beyond the range
of supplied tabulated data to Warning to
receive a warning if this occurs, or Error to stop the
simulation when this occurs. For parameterization by input signal for volumetric or
mechanical losses, you can be notified if the simulation surpasses operating modes
with the Check if operating beyond pump mode parameter.
You can also monitor pump functionality. Set Check if pressures are less
than pump minimum pressure to Warning to
receive a warning if this occurs, or Error to stop the
simulation when this occurs.
Predefined Parameterization
Pre-parameterization of the Fixed-Displacement Pump (IL) block with manufacturer data is available. This data allows you to model a specific supplier component.
To load a predefined parameterization,
Click the "Select a predefined parameterization" hyperlink in the Fixed-Displacement Pump (IL) block dialog description.
Select a part from the drop-down menu and click Update block with selected part.
If you change any parameter settings after loading a parameterization, you can check your changes by clicking Compare block settings with selected part. Any difference in settings between the block and pre-defined parameterization will display in the MATLAB command window.
Note
Predefined parameterizations of Simscape components use available data sources for supplying parameter values. Engineering judgment and simplifying assumptions are used to fill in for missing data. As a result, deviations between simulated and actual physical behavior should be expected. To ensure requisite accuracy, you should validate simulated behavior against experimental data and refine component models as necessary.
Examples
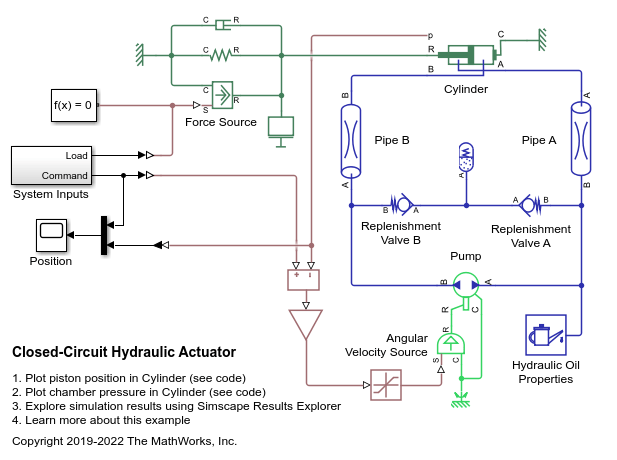
Closed-Circuit Hydraulic Actuator
A closed-circuit hydraulic actuator driven by a variable-speed pump. The actuator is arranged as a closed fluid system with two replenishment valves (check valves) and a spring-loaded accumulator serving as a replenishment reservoir. The pump speed is controlled by the difference between the commanded and measured piston position. The actuator acts against a spring, a damper, and a time-varying load.

Power-Assisted Steering Mechanism
A simplified version of a power-assisted steering mechanism. The hydraulic actuation system includes a double-acting hydraulic cylinder, 4-way valve, fixed-displacement pump, and a pressure-relief valve. The steering rack acts against a load modeled by a spring and damper.