Estimar un modelo de proceso
Realizar la estimación de un modelo de proceso en tiempo continuo para un sistema de única entrada y única salida (SISO) en el dominio del tiempo o la frecuencia en Live Editor
Descripción
La tarea Estimate Process Model permite estimar y validar de manera interactiva un modelo de proceso para sistemas SISO. Puede definir y variar la estructura del modelo y especificar parámetros opcionales, como el método de gestión de la condición inicial y de búsqueda. La tarea genera automáticamente código de MATLAB® para un script en vivo. Para obtener más información sobre las tareas de Live Editor en general, consulte Add Interactive Tasks to a Live Script.
Los modelos de proceso son funciones de transferencia en tiempo continuo sencillas que describen la dinámica del sistema lineal. Los elementos de un modelo de proceso incluyen ganancia estática, constantes de tiempo, retardos de tiempo, integrador y cero de proceso.
Los modelos de proceso son populares para describir dinámicas de sistema en muchos sectores y son aplicables a distintos entornos de producción. Las ventajas de estos modelos son que son sencillos, admiten estimación del retardo de transporte y los coeficientes del modelo son fáciles de interpretar como polos y ceros. Para obtener más información sobre la estimación de modelos de procesos, consulte What Is a Process Model?
La tarea Estimate Process Model es independiente de la app más general System Identification. Utilice la app System Identification cuando desee calcular y comparar estimaciones para múltiples estructuras de modelo.
Para comenzar, cargue datos de experimentos que contengan datos de entrada y salida en el área de trabajo de MATLAB y, después, importe esos datos a la tarea. Después, seleccione una estructura de modelo que se va a estimar. La tarea proporciona controles y gráficas que permiten experimentar con diferentes estructuras de modelo y comparar cuán bien se ajusta la salida de cada modelo a las mediciones.
Abrir la tarea
Para añadir la tarea Estimate Process Model a un script en vivo en el editor de MATLAB:
En la pestaña Live Editor, seleccione Task > Estimate Process Model.
En un bloque de código de su script, escriba una palabra clave relevante, como
processoestimate. SeleccioneEstimate Process Modelde entre las terminaciones de comandos sugeridas.
Ejemplos
Utilice la tarea Estimate Process Model de Live Editor para estimar un modelo de proceso y comparar la salida del modelo con los datos de medición.
Configurar datos
Cargue los datos de medición tt1 en el área de trabajo de MATLAB. tt1 es un horario que contiene una variable de entrada u y una variable de salida y.
load sdata1 tt1
Importar datos a la tarea
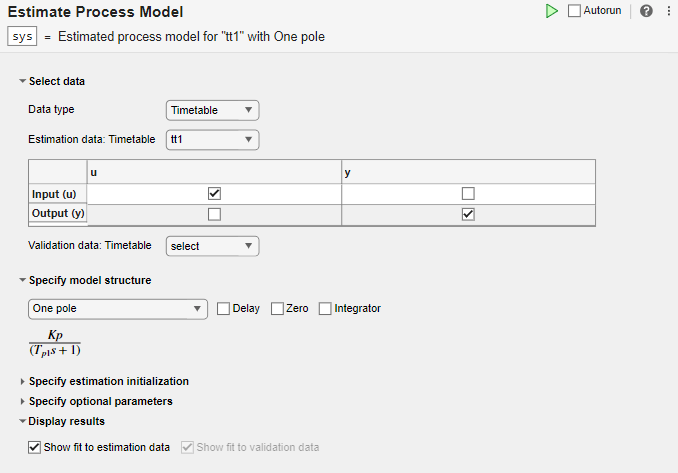
En la sección Select data, establezca Data type en Timetable y establezca Estimation data en tt1.
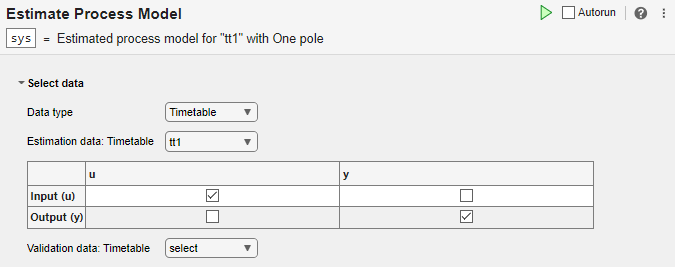
La tarea muestra una tabla que contiene los nombres de la variable de entrada y de salida de tt1.
Realizar la estimación del modelo utilizando la configuración predeterminada
Examine la estructura del modelo y los parámetros opcionales.
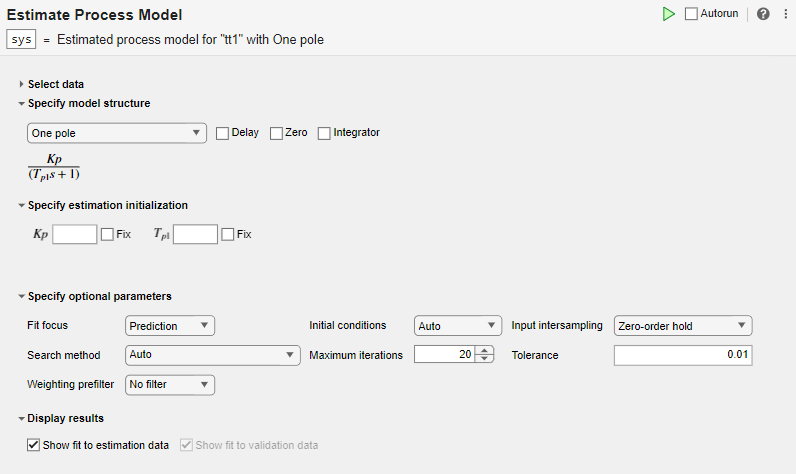
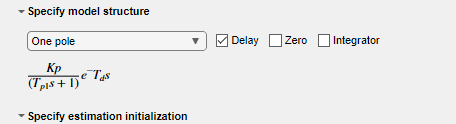
En la sección Specify model structure , la opción predeterminada es One Pole sin retardo, cero o integrador. Las ecuaciones debajo de los parámetros de esta sección muestran la estructura especificada.
En la sección Specify estimation initialization, los parámetros de inicialización que coinciden con los parámetros de la estructura del modelo permiten establecer puntos de partida para la estimación. Si selecciona Fix, el parámetro permanece fijo en el valor que especifique. Para este ejemplo, no especifique la inicialización. La tarea utiliza entonces valores predeterminados para los puntos de partida.
En la sección Specify optional parameters, las opciones predeterminadas para la estimación del proceso están establecidas.
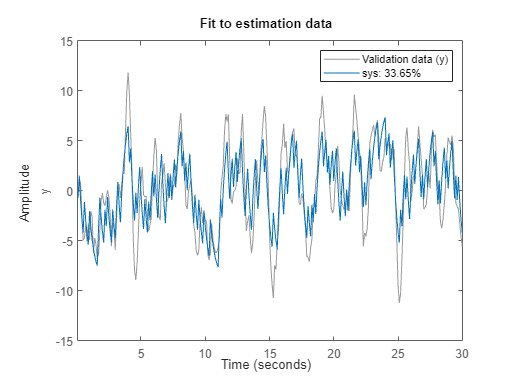
Ejecute la tarea desde la pestaña Live Editor haciendo clic en la flecha verde. También puede seleccionar Autorun para ejecutar la tarea automáticamente cada vez que actualice un parámetro.
![]()
Una gráfica muestra los datos de estimación, la salida del modelo estimado y el porcentaje de ajuste.
Experimentar con la configuración de parámetros
Experimente con la configuración de parámetros y descubra cómo influyen en el ajuste.
Por ejemplo, añada retardo a la estructura One Pole y ejecute la tarea.
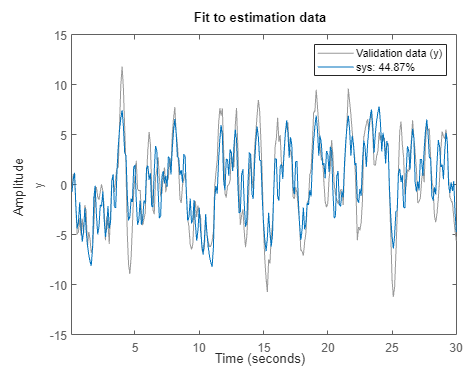
El ajuste de la estimación mejora, aunque el porcentaje de ajuste sigue estando por debajo del 50%.
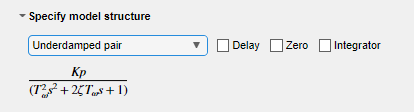
Pruebe una estructura de modelo diferente. En Specify model structure, seleccione Underdamped Pair sin retardo y ejecute la tarea.
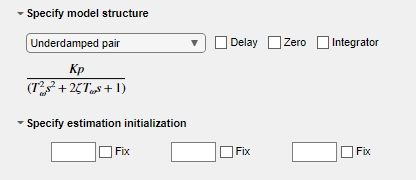
Los resultados del ajuste mejoran de manera significativa.
Generar código
Para mostrar el código que la tarea genera, haga clic en ![]() , en la parte inferior de la sección de parámetros. El código que se muestra refleja la configuración de parámetros actual de la tarea.
, en la parte inferior de la sección de parámetros. El código que se muestra refleja la configuración de parámetros actual de la tarea.
Utilice datos de estimación y de validación independientes para poder validar el modelo de proceso estimado.
Configurar datos
Cargue los datos de medición sdata1 en el área de trabajo de MATLAB y examine el contenido.
load sdata1 umat1 ymat1 Ts
Divida los datos en dos conjuntos, la mitad para la estimación y la mitad para la validación. El conjunto de datos original tiene 300 muestras, de modo que cada conjunto de datos nuevo tiene 150 muestras.
u_est = umat1(1:150); u_val = umat1(151:300); y_est = ymat1(1:150); y_val = ymat1(151:300); Ts
Ts = 0.1000
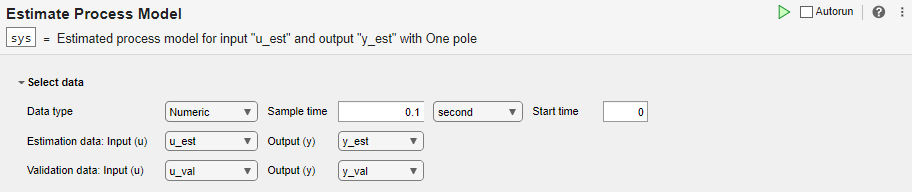
Importar datos a la tarea
En la sección Select data, establezca Data type en Numeric. Establezca el tiempo de muestreo en 0.1 segundos. Seleccione los conjuntos de datos adecuados para la estimación y la validación.
Realizar la estimación y validación del modelo
El ejemplo Realizar la estimación de un modelo de proceso con una tarea de Live Editor consigue los mejores resultados utilizando la estructura de modelo Underdamped Pair. Elija la misma opción para este ejemplo.
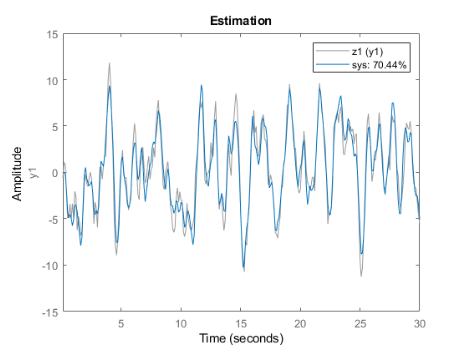
Ejecute la tarea. Cuando se ejecuta la tarea, se crean dos gráficas. La primera gráfica muestra los resultados de la estimación y la segunda gráfica, los resultados de la validación.

El ajuste a los datos de estimación es inferior al obtenido en Realizar la estimación de un modelo de proceso con una tarea de Live Editor. La estimación en el ejemplo actual solo tiene la mitad de los datos con los que estimar el modelo. El ajuste a los datos de validación, que representa la bondad del modelo de forma más general, es superior al ajuste a los datos de estimación.