deconvwnr
Enfocar una imagen borrosa usando el filtro de Wiener
Descripción
J = deconvwnr(I,psf,nsr)I usando el algoritmo del filtro de Wiener, devolviendo enfocada la imagen borrosa J. psf es la función de dispersión puntual (PSF) con la que I fue convolucionada. nsr es la relación de potencia señal-ruido del ruido aditivo. El algoritmo es óptimo en un sentido de error cuadrático medio mínimo entre las imágenes estimadas y reales.
Ejemplos
Lea una imagen en el área de trabajo y muéstrela.
I = im2double(imread('cameraman.tif')); imshow(I); title('Original Image (courtesy of MIT)');

Simule un desenfoque de movimiento.
LEN = 21; THETA = 11; PSF = fspecial('motion', LEN, THETA); blurred = imfilter(I, PSF, 'conv', 'circular'); figure, imshow(blurred)

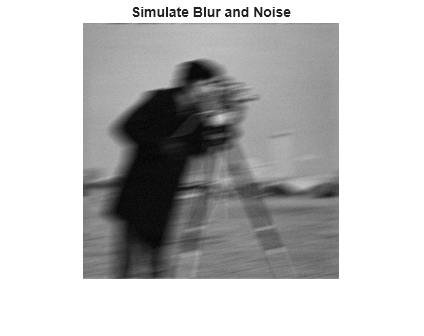
Simule ruido aditivo.
noise_mean = 0; noise_var = 0.0001; blurred_noisy = imnoise(blurred, 'gaussian', ... noise_mean, noise_var); figure, imshow(blurred_noisy) title('Simulate Blur and Noise')
Pruebe el restablecimiento suponiendo que no hay ruido.
estimated_nsr = 0;
wnr2 = deconvwnr(blurred_noisy, PSF, estimated_nsr);
figure, imshow(wnr2)
title('Restoration of Blurred, Noisy Image Using NSR = 0')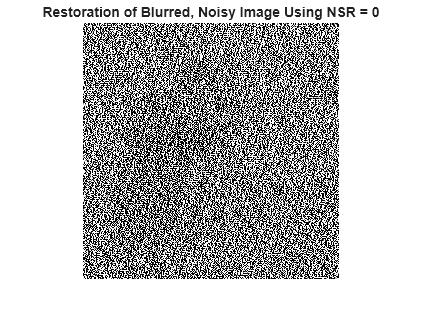
Pruebe el restablecimiento con una mejor estimación de la relación de potencia señal-ruido.
estimated_nsr = noise_var / var(I(:));
wnr3 = deconvwnr(blurred_noisy, PSF, estimated_nsr);
figure, imshow(wnr3)
title('Restoration of Blurred, Noisy Image Using Estimated NSR');
Argumentos de entrada
Argumentos de salida
Sugerencias
La imagen de salida
Jpodría mostrar artefactos de anillo introducidos por la transformada discreta de Fourier utilizada en el algoritmo. Para reducir la intensidad de los artefactos , utiliceI = edgetaper(I,psf)antes de llamar adeconvwnr.
Referencias
[1] Gonzalez, R. C., and R. E. Woods. Digital Image Processing. Addison-Wesley Publishing Company, Inc., 1992.
Historial de versiones
Introducido antes de R2006a
Consulte también
deconvblind | deconvlucy | deconvreg | edgetaper | otf2psf | padarray | psf2otf