rotate
Rotate object about specified origin and direction
Description
Note
hgtransform is recommended over
rotate because it provides better performance. Consider using
hgtransform unless you need to specify the origin of the axis of
rotation.
rotate(
rotates the graphics object h,direction,angle)h in the specified direction by the
specified number of degrees. rotate modifies the data of the graphics
object, including the values of the Xdata, Ydata, and
Zdata properties. This behavior is different from that of view and rotate3d, which modify only the
viewpoint.
Examples
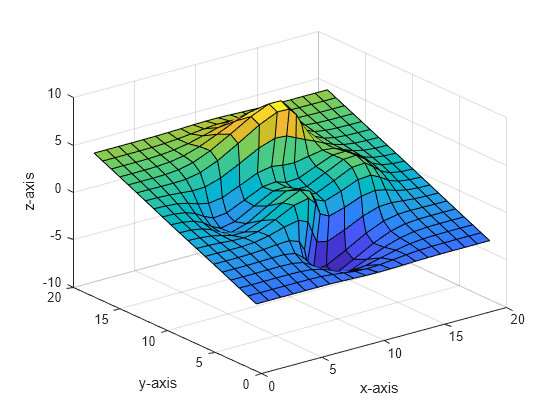
Create a surface plot of the peaks function and return the surface object.
s = surf(peaks(20)); xlabel("x-axis") ylabel("y-axis") zlabel("z-axis") axis([0 20 0 20 -10 10])

Rotate the surface plot 25 degrees clockwise around its x-axis.
direction = [1 0 0]; rotate(s,direction,25)
Create a surface plot of the peaks function and return the surface object.
s = surf(peaks(20)); xlabel("x-axis") ylabel("y-axis") zlabel("z-axis") axis([0 20 0 20 -10 10])

Rotate the surface plot 25 degrees clockwise around its x-axis and y-axis.
direction = [1 1 0]; rotate(s,direction,25)

Create a surface plot of the peaks function and return the surface object.
s = surf(peaks(20)); xlabel("x-axis") ylabel("y-axis") zlabel("z-axis") axis([0 20 0 20 -10 10])

Rotate the surface plot 30 degrees counterclockwise around its y-axis, and set the origin of rotation to (20, 10, 0).
s = surf(peaks(20)); xlabel("x-axis") ylabel("y-axis") zlabel("z-axis") axis([0 20 0 20 -10 10]) direction = [0 -1 0]; origin = [20 10 0]; rotate(s,direction,30,origin)

Input Arguments
More About
The axis of rotation is defined by an origin of rotation and a direction vector or point
P. For the rotate function, use the direction
input argument to specify P as the spherical coordinates [theta
phi] or as the Cartesian coordinates [x y z].
In the two-element form for direction, theta is
the angle in the xy-plane counterclockwise from the positive
x-axis. phi is the elevation of the direction
vector from the xy-plane.

The three-element form for direction specifies the Cartesian
coordinates of point P. The axis of rotation follows the direction vector
from the origin of rotation to P.

Version History
Introduced before R2006a
See Also
hgtransform | view | rotate3d | sph2cart