Sensorless Six-Step Commutation
Use six-step commutation to run a BLDC motor or PMSM using sensorless control
Since R2025a
Libraries:
Motor Control Blockset /
Controls /
Controllers
Description
The Sensorless Six-Step Commutation block uses six-step commutation to run a Brushless DC Motor (BLDC) motor or Permanent Magnet Synchronous Motor (PMSM) using sensorless control.
The block uses VabcMeas (measured terminal
voltages) and VdcMeas (DC bus voltage) inputs to
generate duty cycles for the six switches of inverter. You can select the operating mode as
Alignment, Alignment -> Open-loop run, or
Alignment -> Open-loop run -> Controlled commutation.
The Alignment phase in sensorless six-step commutation is used to
initialize the rotor position of a BLDC motor, so that it can start correctly. The method
applies specific voltages to the motor phases A and B, so that the rotor is forced to align
with a known position (-30 electrical degrees with respect to phase A).
The Open-loop run phase in sensorless six-step commutation is used to
reach a speed for the motor to generate sufficient back-EMF that can be used to detect the
zero crossings of back-EMF (the recommended value for this speed can vary from 10 - 30% of
motor rated speed). In this phase, you need to provide the voltage magnitude (Open-loop
duty cycle) and acceleration as inputs. The frequency of applied voltage (or motor speed)
increases linearly according to another set of inputs – ramp-up time and target open loop
speed. Initially, a voltage is applied to all three phases, with a slow increase in
frequency of the applied voltage. The rotor is expected to synchronize with applied
voltage, and it continues to rotate at the specified speed. The block acquires terminal
voltage and detects zero crossings of motor back-EMF. These detections are used to compute
the actual speed of the motor and indicate readiness to move to controlled commutation
state.
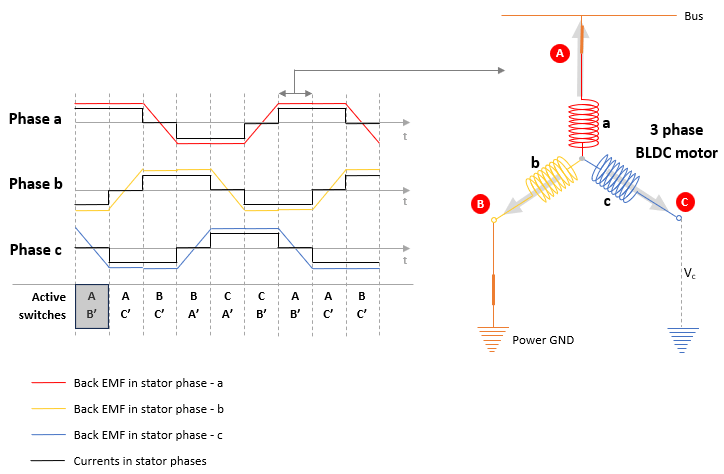
In the final phase, Controlled commutation, speed and six-step
commutation instants are accurately determined from back-EMF zero cross detections. The
applied magnetic field leads the rotor by 60-120 degrees (electrical). This behavior is the
same as what can be achieved even when using a hall sensor with six-step commutation. The
block uses the zero-crossing point of the back-EMF in the dormant motor phase during each
60-degree sector to determine the moment of activation of dormant phase. It adds a
30-degree offset to the zero-crossing point to turn ON the dormant phase (and turn OFF one
of the other phases) at correct moment in time.
Note
By default, the block uses the Controlled commutation phase, which
uses default pre-populated values for the various parameters. However, you can follow a
sequential workflow by using the option to select the other two phases in the same
block, which also helps to obtain derived values for all required parameters, specific
to your motor, prior to moving to Controlled commutation phase. For
example, you can follow this sequence:
Select
Alignmentphase and deploy the model to run the motor and obtain derived values related to that phase.Select
Open-loop runphase, use derived values fromAlignmentphase, and deploy the model to run the motor and obtain derived values related toOpen-loop runphase.Select
Controlled Commutationphase, use derived values fromAlignmentandOpen-loop runphases, and deploy the model to run the motor in controlled commutation.
Examples
Sensorless Speed Control of BLDC Motor Using Six-Step Commutation
Uses 120-degree conduction mode to implement the six-step commutation technique to control the speed of a three-phase brushless DC (BLDC) motor. The example uses the mechanical speed along with the duty cycles generated by the Sensorless Six-Step Commutation block to control three-phase stator voltages, and therefore, control the rotor speed.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2025a