insertPointCloud
Insertar datos de nube de puntos en un mapa de distancias con signo 3D
Desde R2024b
Descripción
insertPointCloud( inserta una nube de puntos en el mapa de distancia firmado en 3D proyectando rayos desde el origen especificado a cada uno de los puntos especificados y actualiza los valores de distancia de todos los vóxeles que el algoritmo del analizador diferencial digital (DDA) determina que alcanza cada rayo. La propiedad sdm3D,origin,points)FullTracing del mapa de distancia firmado en 3D determina el tipo de lanzamiento de rayos. Consulte FullTracing para obtener más información.
Ejemplos
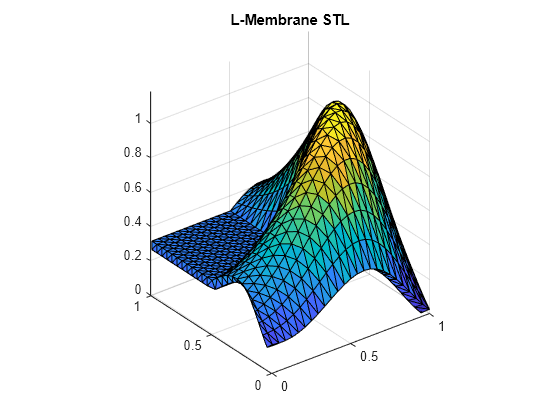
Lea y grafique los datos de triangulación del STL de membrana L. Puedes usar esto para comparar con el mapa de distancia firmado.
triL = stlread("L-Membrane.stl"); trisurf(triL) title("L-Membrane STL") [az,el] = view; axis equal
Cree un campo de distancia firmado 3-D vacío (SDF) y cargue los datos de la nube de puntos para la membrana L desde un archivo MAT. El archivo MAT contiene datos de la nube de puntos y el origen del sensor asociado con cada dato de la nube de puntos.
sdm3D = signedDistanceMap3D(Resolution=50);
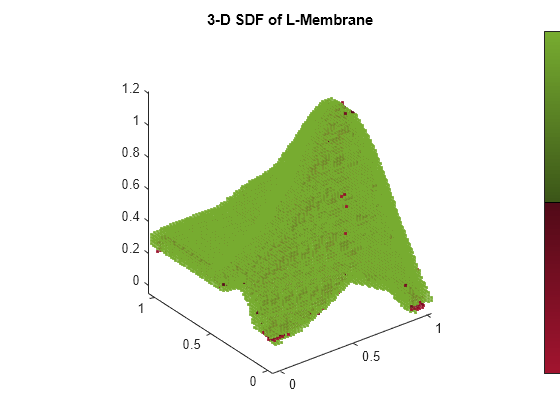
load LMembranePC.matInserte cada nube de puntos en el campo de distancia firmado y muestre la SDF 3-D actualizada.
for i = 1:size(ptcloud,1) insertPointCloud(sdm3D,origin(i,:),ptcloud{i}); show(sdm3D,Colorbar="on"); view(az,el) axis equal drawnow pause(.25) end title(["3-D SDF of L-Membrane"])
Obtenga todos los vóxeles activos en el SDF 3-D.
vox = activeVoxels(sdm3D)
vox = struct with fields:
ID: 1
Centers: [49889×3 double]
Distances: [49889×1 double]
Sizes: [49889×1 double]
Para fines demostrativos, utilice un desplazamiento xyz aleatorio desde los centros de los vóxeles de los primeros tres vóxeles como puntos de consulta. Luego obtenga la distancia y la pendiente utilizando esos puntos de consulta.
querypts = vox.Centers(1:3,:) + 0.1*rand(3,3); d = distance(sdm3D,querypts)
d = 3×1
0.0379
-0.0447
0.0600
g = gradient(sdm3D,querypts)
g = 3×3
0.1924 1.5773 -1.4002
0.1689 1.6524 -0.8267
-0.0715 -0.2335 0.3677
Genere una malla a partir del campo de distancia firmado en 3D.
[vertices,faces] = mesh(sdm3D)
vertices = 18860×3
-0.0100 0.0068 0.1500
-0.0300 0.0059 0.1500
-0.0100 0.0100 0.1610
-0.0300 0.0100 0.1565
0.0100 0.0047 0.1500
-0.0100 -0.0100 0.1409
0.0100 -0.0100 0.1421
0.0100 0.0025 0.1700
-0.0010 0.0100 0.1700
0.0100 0.0094 0.1900
0.0089 0.0100 0.1900
0.0100 0.0100 0.1909
-0.0100 0.0187 0.1700
-0.0300 0.0259 0.1700
-0.0100 0.0552 0.1500
⋮
faces = 37094×3
2 1 3
4 2 3
7 1 6
5 1 7
9 3 1
9 1 8
8 1 5
8 10 11
9 8 11
10 12 11
3 14 4
13 14 3
15 16 17
16 18 17
9 13 3
⋮
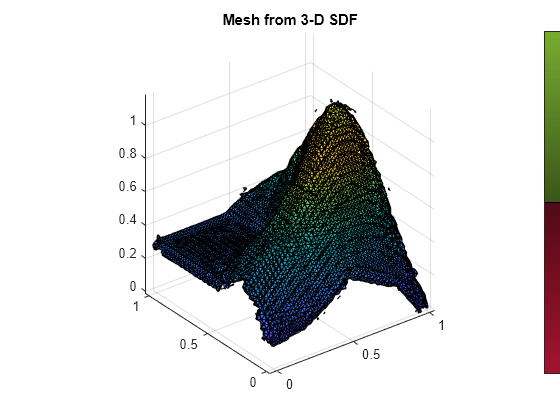
Visualizar los datos de la malla.
meshTri = triangulation(faces,vertices); trisurf(meshTri) axis equal title("Mesh from 3-D SDF")
Si es necesario, puede utilizar estos datos de malla para crear una malla de colisión utilizando V-HACD. Consulte collisionVHACD (Robotics System Toolbox) para obtener más información.
Argumentos de entrada
Capacidades ampliadas
Historial de versiones
Introducido en R2024b