phased.SphericalWavefrontArrayResponse
Description
The phased.SphericalWavefrontArrayResponse
System object™ calculates the complex-valued response of a sensor array to a spherical
wave.
To compute the response:
Create the
phased.SphericalWavefrontArrayResponseobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
The
response = phased.SphericalWaveformArrayResponsephased.SphericalWaveformArrayResponse
System object
response with default property values.
response = phased.SphericalWaveformArrayResponse(Name,Value)phased.SphericalWaveformArrayResponse object with each property
Name set to a specified Value. You can specify
additional name-value pair arguments in any order as
(Name1,Value1,...,NameN,ValueN).
Enclose each property name in single quotes.
Example: response =
phased.SphericalWaveformArrayResponse('SensorArray',phased.URA([10,20],'ElementSpacing',[0.25,0.25]),'PropagationSpeed',physconst('LightSpeed'))
creates a phased.SphericalWaveformArrayResponse
System object for a 10-by-20 uniform rectangular array (URA) with element spacing set to
0.25 meters The propagation speed set to the speed of light.
Properties
Usage
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
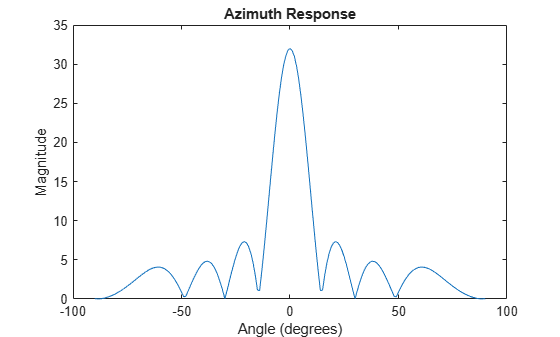
Calculate and plot the azimuth response of a 4-by-8 uniform rectangular array at directions between and in azimuth at a range of 1 km. Assume the array operating frequency is 300 MHz.
Create the array and the phased.SphericalWavefrontArrayResponse System object™.
array = phased.URA([4,8]); response = phased.SphericalWavefrontArrayResponse( ... 'SensorArray',array); ang = -90:90; rng = 1000.0; fc = 300e6;
Compute and plot the response as a function of azimuth angle.
resp = response(fc,ang,rng); plot(ang,abs(resp)) xlabel('Angle (degrees)') ylabel('Magnitude') title('Azimuth Response')
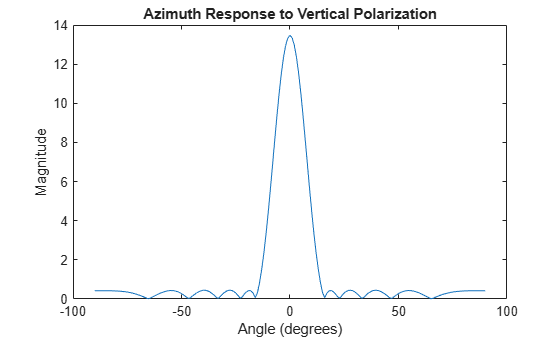
Calculate and plot the azimuth response of an 11-element uniform linear array at directions between and in azimuth at a range of 1 km. Create a polarized field using short-dipole antenna elements. Assume the array operating frequency is 300 MHz.
Create the ULA array and the phased.SphericalWavefrontArrayResponse System object™.
antenna = phased.ShortDipoleAntennaElement; array = phased.ULA(11,'Element',antenna); response = phased.SphericalWavefrontArrayResponse( ... 'SensorArray',array,'EnablePolarization', ... true,'WeightsInputPort',true); ang = -90:90; rng = 1000.0; fc = 300e6; w = taylorwin(11);
Compute and plot the response as a function of azimuth angle.
resp = response(fc,ang,rng,w); plot(ang,abs(resp.V)) xlabel('Angle (degrees)') ylabel('Magnitude') title('Azimuth Response to Vertical Polarization')
Extended Capabilities
Version History
Introduced in R2021b