Generar una trayectoria B-spline
Este ejemplo muestra cómo generar una trayectoria B-Spline mediante el bloque Polynomial Trajectory.
Abra el modelo. Las entradas Waypoints y TimeInterval se alternan en la máscara del bloque definiendo Waypoint source en External. En el caso de B-splines, los waypoints son realmente puntos de control para el polígono convexo, pero el primer waypoint y el último se encuentran. La entrada Tiempo es simplemente una señal rampa para simular el avance del tiempo.
open_system('bspline_polytraj_ex1.slx')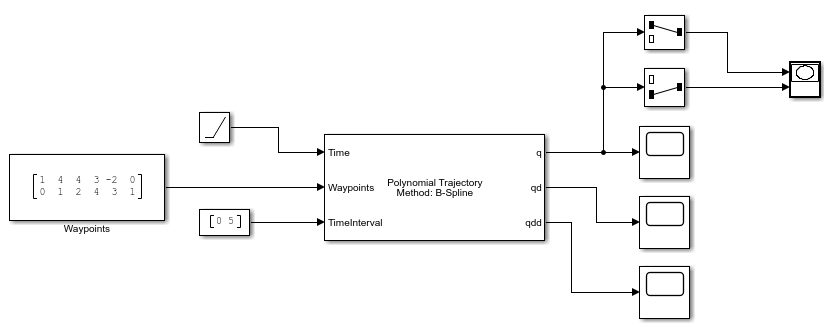
Ejecute la simulación. La primera figura muestra la salida del vector q para las posiciones de la trayectoria. La gráfica X Y muestra la trayectoria real en 2D, que permanece dentro de los puntos de control definidos y recorre el primer waypoint y el último.

