Generación de trayectorias
Estas funciones utilizan diferentes ecuaciones matemáticas para generar trayectorias para manipuladores robóticos. Los polinomios, las B-splines y los perfiles de velocidad trapezoidal permiten generar trayectorias para sistemas con múltiples grados de libertad (DOF). También puede interpolar entre matrices de rotación y transformaciones homogéneas.
Estos ejemplos muestran diferentes aplicaciones de la ejecución de trayectorias, incluida la planificación, el control y la simulación de seguimiento de formas y flujos de trabajo de pick-and-place.
Funciones
Bloques
| Polynomial Trajectory | Generar trayectorias polinomiales a través de waypoints |
| Rotation Trajectory | Generate trajectory between two orientations |
| Transform Trajectory | Generate trajectory between two homogeneous transforms |
| Trapezoidal Velocity Profile Trajectory | Generar trayectorias a través de múltiples waypoints con perfiles de velocidad trapezoidal |
| Minimum Jerk Polynomial Trajectory | Generate minimum jerk polynomial trajectories through multiple waypoints (Desde R2022a) |
| Minimum Snap Polynomial Trajectory | Generate minimum snap polynomial trajectories through multiple waypoints (Desde R2022a) |
Temas
- Choose Trajectories for Manipulator Paths
Explore and compare different manipulator trajectory types by generating paths for these trajectory profiles.
- Generate Time-Optimal Trajectories with Constraints Using TOPP-RA Solver
Generate trajectories within velocity and acceleration limits using TOPP-RA solver for time-optimal path planning.
- Manipulator Shape Tracing in MATLAB and Simulink
Generate a smooth 3-D path for Sawyer robot end-effector by tracing predefined 3-D shapes.
Ejemplos destacados
Perform Safe Trajectory Tracking Control Using Robotics Manipulator Blocks
Achieve safe trajectory tracking control of a simulated robot using manipulator algorithm blocks in Simulink®.

Planear la trayectoria con jerk mínimo para el brazo robótico
Planifique y visualice una trayectoria con jerk mínimo para que un brazo robótico se mueva entre obstáculos.

Design Trajectory with Velocity Limits Using Trapezoidal Velocity Profile
Use the trapezoidal velocity profile to design a trajectory with input bounds in place of parameters.

Planificar y ejecutar trayectorias de espacio cartesiano o articular utilizando el manipulador Kinova Gen3
Genere y simule trayectorias de articulación interpoladas para moverse a la pose del efector final deseada usando el manipulador Kinova® Gen3.
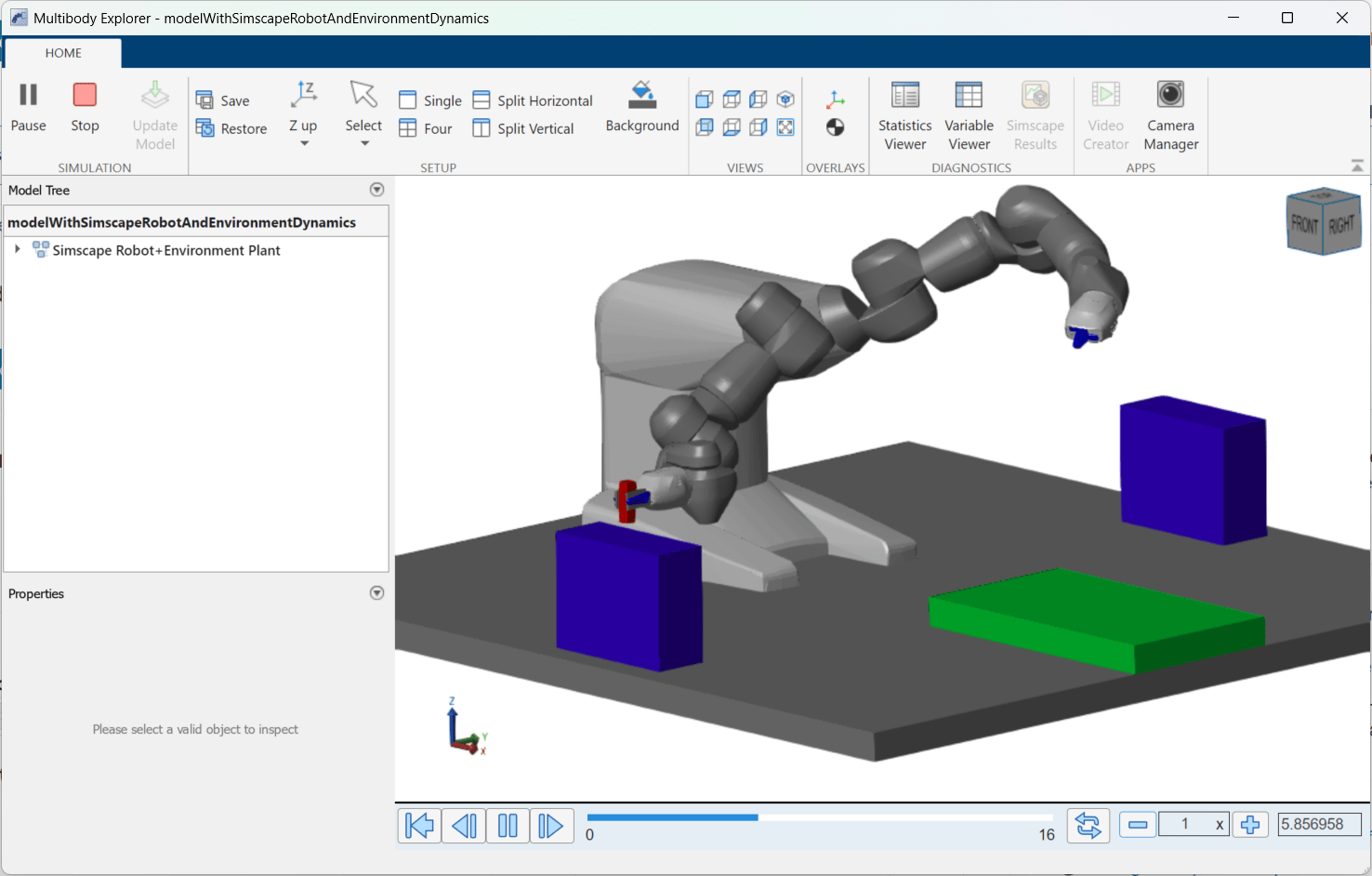
Modelar y controlar un brazo de manipulador con robótica y Simscape
Diseñe algoritmos de robot YuMi en Simulink y simule en Simscape™, haciendo hincapié en la precisión del algoritmo y el modelado del sistema.