Generar una trayectoria de rotación
En este ejemplo se muestra cómo generar una trayectoria que se interpole entre rotaciones mediante el bloque Rotation Trajectory (Trayectoria de rotación).
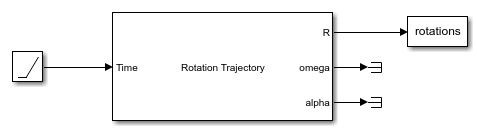
Abra y simule el modelo. El bloque Rotation Trajectory (Trayectoria de rotación) genera la trayectoria entre dos rotaciones y guarda las rotaciones intermedias en la variable rotations. En este ejemplo se genera una trayectoria de rotación simple desde el eje x hasta el eje z.
open_system('rot_traj_ex1.slx') simOut = sim('rot_traj_ex1.slx');
Utilice plotTransforms para representar la trayectoria de rotación.
numRotations = size(simOut.rotations,3); translations = zeros(3,numRotations); figure("Visible","on") for i = 1:numRotations plotTransforms(translations(:,i)',simOut.rotations(:,i)') xlim([-1 1]) ylim([-1 1]) zlim([-1 1]) drawnow pause(0.1) end
